chybameranie
Odchýlka výsledku merania od skutočnej (platnej) hodnoty nameranej hodnoty.
Synonymický výraz chyba merania je termín chyba meraniaktoré sa neodporúča ako menej úspešné
Komponentná chyba výsledku merania, ktorá zostáva konštantná alebo sa pravidelne mení pri opakovaných meraniach rovnakého fyzikálneho množstva.
Poznámka - V závislosti od charakteru merania sa systematické chyby delia na trvalé, progresívne, pravidelné a zložité právne chyby.
Konštantné chyby - chyby, ktoré si dlho uchovávajú svoju hodnotu, napríklad počas doby realizácie celej série meraní. Sú najčastejšie.
Progresívne chyby - neustále narastajúce alebo klesajúce chyby. Patria sem napríklad chyby spôsobené opotrebovaním meracích hrotov v kontakte s časťou, keď je riadené aktívnym ovládacím zariadením.
Pravidelné chyby sú chyby, ktorých hodnota je periodická funkcia času alebo pohybu ukazovateľa meradla.
Chyby, ktoré sa menia podľa zložitého zákona, sa vyskytujú v dôsledku spoločného konania niekoľkých systematických chýb.
Súčasť chyby merania v dôsledku chyby použitého meradla
chyba metódy
Súčasť systematickej chyby merania spôsobenej nedokonalosťou prijatej metódy merania.
poznámky
1 Vzhľadom na zjednodušenia prijaté v rovniciach na meranie sa často vyskytujú významné chyby, ktoré kompenzujú činnosť, ktorej opravy by sa mali zaviesť. Chyba metódy sa niekedy nazýva teoretická chyba.
2 Niekedy sa chyba metódy môže zobraziť ako náhodná.
Zložka systémovej chyby merania, ktorá je dôsledkom neočakávaného vplyvu odchýlky v jednom smere od ktoréhokoľvek z parametrov charakterizujúcich podmienky merania od nastavenej hodnoty.
Poznámka - tento pojem sa používa v prípade nepočítaných alebo nedostatočne zohľadnených činností konkrétnej ovplyvňujúcej hodnoty (teplota, atmosférický tlak, vlhkosť vzduchu, sila magnetického poľa, vibrácie atď.); nesprávna inštalácia meracích prístrojov, porušenie pravidiel ich vzájomného usporiadania atď.
subjektívna chyba
Súčasť systematickej chyby merania v dôsledku individuálnych charakteristík prevádzkovateľa.
poznámky
1 Existujú operátori, ktorí systematicky neskoro (alebo dopredu) berú údaje o meracích prístrojoch.
2 Niekedy sa nazýva subjektívna chyba osobná chyba alebo osobné rozdiely
NSP
Chyba komponentov výsledku merania v dôsledku chýb vo výpočte a zavedenie zmien vplyvu systematických chýb alebo systematických chýb, korekcia ktorých účinok nie je zavedený z dôvodu jeho malého rozsahu.
náhodná chyba
Chyba komponentov výsledku merania, náhodná zmena (znakom a hodnotou) počas opakovaných meraní vykonaných s rovnakou starostlivosťou, rovnakou fyzikálnou veličinou
absolútna chyba
Chyba merania, vyjadrená v jednotkách meranej veličiny
Hodnota chyby bez zohľadnenia jeho znamienka (modul chyby)
Poznámka - Je potrebné rozlišovať medzi výrazmi. absolútna chyba a absolútna hodnota chyby
relatívna chyba
Chyba merania, vyjadrená ako pomer absolútnej chyby merania k aktuálnej alebo nameranej hodnote nameranej hodnoty.
výsledky rozptylu;
rozptyl
Rozdiel medzi výsledkami meraní rovnakej veľkosti v sérii rovnakých meraní je spravidla spôsobený náhodnými chybami.
poznámky
1 Kvantitatívny odhad rozptýlenia výsledkov v sérii meraní v dôsledku účinku náhodných chýb sa obyčajne dosahuje po zavedení korekcií na účinok systematických chýb.
2 Odhady rozptýlenia výsledkov v sérii meraní môžu byť:
rozsah,
aritmetická priemerná chyba (podľa modulu),
štandardná odchýlka alebo štandardná odchýlka (štandardná odchýlka, experimentálna štandardná odchýlka),
hranice spoľahlivosti chyby (limit dôvery alebo chyba dôvery)
zametanie
ohodnotenie R n rozptyl výsledkov jednotlivých meraní fyzikálneho množstva, ktoré tvoria sériu (alebo vzorku n merania) vypočítané podľa vzorca
R n = X max - X min
kde X max a X min - najväčšie a najmenšie hodnoty fyzikálneho množstva v tejto sérii meraní.
Poznámka - Rozptyl je zvyčajne spôsobený výskytom náhodných príčin v meraní a má pravdepodobnostný charakter.
stredná štvorcová chyba merania;
stredná štvorcová chyba;
UPC
Odhad rozptýlenia jednotlivých výsledkov merania v sérii rovnakých meraní s rovnakou fyzikálnou veličinou okolo ich priemernej hodnoty
kde xi je výsledkom merania i-tej jednotky;
X je aritmetický priemer nameranej hodnoty n jednotlivých výsledkov.
POZNÁMKA V praxi je tento pojem rozšírený. priemer štvorca odchýlka - (SKO). Odchýlka podľa vzorca (9.6) sa chápe ako odchýlka jednotlivých výsledkov v sérii meraní od ich aritmetickej strednej hodnoty. V metrológii, ako je uvedené v bode 9.1, sa táto odchýlka nazýva chyba merania. Ak sú výsledky meraní opravené v dôsledku systematických chýb, potom odchýlky sú náhodné chyby. Preto z hľadiska zjednodušenia súhrnu termínov, ktorých všeobecný pojem je termín "chyba merania", je vhodné použiť termín "stredná štvorcová chyba". Pri spracovaní série výsledkov meraní bez systematických chýb sú EUC a EQ rovnakým odhadom rozptýlenia výsledkov jednotlivých meraní.
stredná štvorcová chyba aritmetického priemeru;
strednákvadratická chyba;
UPC
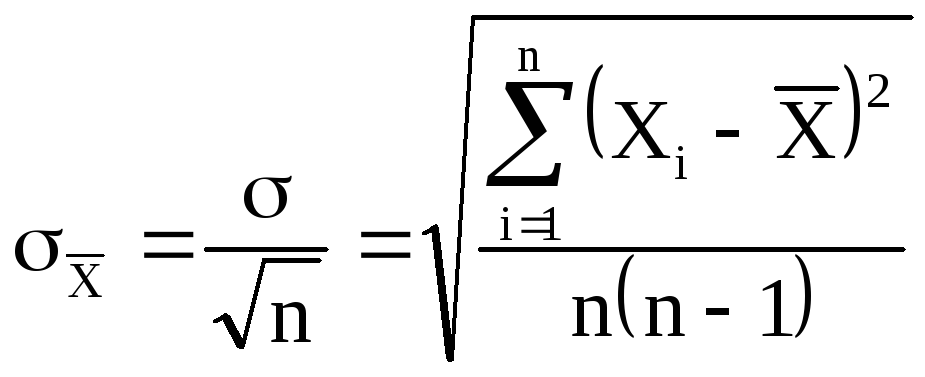
ohodnotenieS x náhodná chyba aritmetického priemeru výsledku merania rovnakej hodnoty v danej sérii meraní vypočítanej podľa vzorca
, (9.7)
kde S je stredná štvorcová chyba výsledkov jednotlivých meraní získaných zo série rovnakých meraní; n je počet jednotlivých meraní v sérii
hranice spoľahlivosti chýb;
limitov spoľahlivosti
Najväčšie a najmenšie hodnoty chyby merania, ktoré obmedzujú interval, v ktorom je požadovaná (pravá) hodnota chyby výsledku merania v rámci určitej pravdepodobnosti.
2 S symetrickými hranicami môže byť termín použitý v singulárnom - limit dôvery.
3 Niekedy namiesto termínu limit dôvery použite termín chyba dôvery alebochyba na danej úrovni spoľahlivosti
9.17 oprava
Hodnota zadaná v nekorigovanom výsledku merania s cieľom odstrániť súčasti systematických chýb.
Poznámka - Znak zmeny je opačný ako znak chyby. Dodatok k nominálnej hodnote opatrenia sa nazýva zmena hodnoty opatrenia; zavedie sa zmena a doplnenie zavedené do meracieho prístrojanovela čítania prístroja
9. 18 korekčný faktor
Číselný koeficient, ktorým sa násobí nekorigovaný výsledok merania, aby sa eliminoval vplyv systematických chýb.
Poznámka - Korekčný faktor sa používa v prípadoch, keď systematické omyly sú úmerné hodnote
9. 19 presnosť výsledku merania;
presnosť merania
Jedna z charakteristík kvality merania, ktorá odráža blízkosť chyby výsledku merania od nuly.
Poznámka - Zvážte, že čím je chyba merania menšia, tým je jej presnosť vyššia
9 . 20 neistota meranie;
neistota
Parameter spojený s výsledkom merania a charakterizujúci rozptyl hodnôt, ktoré možno priradiť nameranej hodnote.
poznámky
1 Definícia prevzatá z VIM-93.
2 Definícia v poznámkach je uvedená, z čoho vyplýva, že:
a) parametrom môže byť štandardná odchýlka (alebo jej násobok) alebo polovica intervalu s určenou úrovňou spoľahlivosti;
b) neistota pozostáva (väčšinou) z mnohých komponentov. Niektoré z týchto komponentov možno odhadnúť experimentálnymi štandardnými odchýlkami v štatisticky distribuovanej sérii meraní. Ďalšie komponenty, ktoré možno odhadnúť aj štandardnými odchýlkami, sú založené na experimentálnych údajoch alebo iných informáciách.
9. 21 chyba metódy kalibrácie
Presnosť použitej metódy prenosu veľkosti jednotky počas kalibrácie
9. 22 chyba merania stupnice;
chyba absolvovania
Chyba reálnej hodnoty hodnoty priradenej jednej alebo druhej značke stupnice meradla v dôsledku odstupňovania
9. 23 chyba prehrávanie jednotky fyzikálneho množstva;
reprodukčná chyba
Chyba výsledkov merania vykonaná pri reprodukcii jednotky fyzickej veličiny.
Poznámka - Chyba reprodukcie jednotky pomocou štátnych štandardov sa zvyčajne uvádza vo forme jeho komponentov: systémová chyba, ktorá nie je vylúčená; náhodná chyba; nestabilita za daný rok
9. Chyba pri prenose veľkosti jednotky fyzického množstva;
chyba veľkosti jednotky
Chyba výsledku merania pri prenose veľkosti jednotky.
Poznámka - Chyba pri prenose veľkosti jednotky zahŕňa aj vylúčené systematické a náhodné chyby metódy a meracích prístrojov
9. 25 statická chyba merania;
statická chyba
Chyba merania pri statických podmienkach merania
9. Chyba dynamického merania;
dynamická chyba
Chyba merania spočívajúca v dynamických podmienkach merania
9. 27 sklzu
Chyba výsledku individuálneho merania, ktorá je zahrnutá v sérii meraní, ktorá je pre tieto podmienky veľmi odlišná od ostatných výsledkov tejto série.
Poznámka - Niekedy sa používa termín "miss" hrubá chyba meranie
9. Maximálna chyba merania v sérii meraní;
miera chyby
Maximálna chyba merania (plus, mínus) povolená pre túto meraciu úlohu.
9. 29 chyba výsledku jedného merania;
chyba merania
Chyba jedného merania (nezahrnutá v sérii meraní), odhadnutá na základe známych chýb prostriedkov a metódy merania v týchto podmienkach (merania).
Príklad - Jednoduché meranie mikrometrov ľubovoľnej veľkosti dielov prináša hodnotu 12,55 mm. Súčasne je pred meraním známe, že chyba mikrometra v tomto rozsahu je ± 0,01 mm a chyba metódy (priame hodnotenie) sa v tomto prípade predpokladá ako nulová. Preto sa chyba výsledku v daných podmienkach merania rovná ± 0,01 mm
9. Celková stredná štvorcová chyba výsledku merania;
celková chyba výsledku;
celková chyba
Chyba výsledku merania (pozostávajúca zo súčtu náhodných a nevylučovaných systematických chýb, považovaných za náhodné) vypočítané podľa vzorca
, (9.8)
kde
Stredná štvorcová chyba súčtu systémových chýb, ktoré nie sú vylúčené, s rovnomerným rozdelením (považované za náhodné).
Poznámka - Limity spoľahlivosti celej chyby (Δx) Σ sa môže vypočítať podľa vzorca
( Δx) Σ = ± t Σ S Σ (9.9)
kde; Θ - limit súčtu neschválených systematických chýb výsledku merania, vypočítaný pomocou vzorcov (9.2) alebo (9.3); t * Sx - limit spoľahlivosti výsledku chyby merania podľa 9.16
Doba nabíjania
od 6,5 do 8,5 V
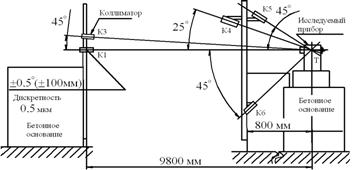
2.4 Stanovenie polohy bodov na zemskom povrchu pomocou geodetických satelitných systémov
Koncepcia a program prenosu topografickej a geodetickej produkcie na autonómne metódy definícií satelitných súradníc, ktoré vyvinula Federálna geodézia kartografie v Rusku, sú prezentované v diele E.A. Zhalkovského, G. V. Demyanovej, V. I. Zubinského, P. L. Makarenko, G. A. Pyankova, "O koncepte a programe prenosu topografickej a geodetickej produkcie na autonómne metódy určovania satelitnej koordinácie" (Geodézia a kartografia, 1998, č. 5). Tradičné geodetické metódy sú založené na dôslednom vývoji geodetických sietí pomocou uhlových a lineárnych meraní, ktoré vyžadujú zabezpečenie priamej viditeľnosti medzi priľahlými bodmi geodetických značiek, ktorých výstavba vyžaduje približne 80% finančných prostriedkov vynaložených na vytvorenie existujúcich referenčných sietí.
V porovnaní s tradičnými satelitnými metódami GLONASS / GPS majú nasledujúce výhody:
prenos s vysokou účinnosťou a presnosťou súradníc na takmer akúkoľvek vzdialenosť;
geodetické body môžu byť umiestnené na miestach, ktoré sú pre ich bezpečnosť vhodné, pretože nie je potrebné zabezpečiť vzájomnú viditeľnosť medzi bodmi a preto stavať drahé geodetické znaky;
jednoduchosť a vysoká úroveň automatizácie práce;
zníženie požiadaviek na hustotu pre pôvodnú geodetickú základňu.
Implementácia satelitnej technológie zahŕňa výstavbu nasledujúcich geodetických sietí:
základná astronomicko-geodetická sieť (FAGS) je najvyššia úroveň koordinovanej podpory; musí zabezpečiť okamžitú reprodukciu všeobecného geocentrického súradnicového systému, stabilitu súradnicového systému v čase, metrologický, poskytovanie vysoko presných meracích prístrojov na meranie priestoru;
vysoko presnú geodetickú sieť (HCV), ktorá zabezpečuje šírenie všeobecného geocentrického súradnicového systému a určenie presných parametrov relatívnej orientácie všeobecných geodetických a referenčných súradnicových systémov v celej krajine;
satelitné geodetické siete 1. triedy (SGS-1).
Tieto tri triedy sietí sú prísne prepojené: FAGS je základom HCG a HCV je pre GHS-1.
Pri konštrukcii FAGS, VGS a GHS-1 je existujúca GGS viazaná na najvyššiu triedu satelitných sietí, t. J. Existujúca GGS bude zahusťovacia sieť.
Body FAGS sa nachádzajú vo vzdialenosti 800 - 1000 km, ich počet - 50 + 70,10 - 15 bodov by mal byť trvale prevádzkovaný a zvyšok by mal byť predefinovaný v skupinách v intervaloch v závislosti od geodynamickej aktivity regiónu.
Priestorová poloha bodov FAGS sa určuje vo všeobecnom systéme zemskej súradnice s chybou polohy bodov vzhľadom na stred hmoty najviac (2-3) 10-8 R, kde R je polomer zeme, chyba relatívnej polohy bodov FAGS nie je väčšia ako 2 cm v rovine a 3 cm na výšku , Na zabezpečenie tejto presnosti je potrebné použiť celý rozsah existujúcich meraní priestoru (laserové, rádiové interferometrické a iné).
HCV je systém bodov so vzdialenosťou D = 150-300 km medzi nimi, ktoré sú určené relatívnymi metódami vesmírnej geodézie so štandardnou chybou menšou ako 3 mm + 5 10-8 D pre plánované súradnice a 5 mm + 7 10-8 D pre geodetické výšky.
GHS-1 sa skladá zo systému ľahko prístupných miest s hustotou dostatočnou na to, aby spotrebitelia mohli používať všetky druhy satelitných definícií. GHS-1 je určený relatívnymi metódami vesmírnej geodézie so štandardnými chybami: 3 mm + 10-7 D v rovine a 5 mm + + 2 10-8 D podľa geodetickej výšky pre geodynamicky aktívne oblasti a 5 mm + 2 10-7. D v pláne a výšku 7 mm + 3 10-7 D pre zostávajúce oblasti. Priemerná vzdialenosť medzi bodmi GHS-1 je 25-35 km. V ekonomicky rozvinutých oblastiach môžu mať SGS-1 body, v závislosti od požiadaviek spotrebiteľov, väčšiu hustotu.
Trvalo fungujúce body FAGS sa vytvárajú hlavne na základe prevádzkových bodov satelitných (vesmírnych) pozorovaní, astronomických observatórií, servisných bodov pre rotáciu zeme, rádiových interferometrických komplexov s veľmi dlhými základňami Kvazaru, programu Delta atď. Existujú dva pozorovacie programy v bodoch FAGS: permanentné systémov satelitného sledovania GLONASSa GPS (vrátane medzinárodných programov) a pozorovania iných špecializovaných satelitov a vesmírnych objektov podľa medzirezortných programov pre výstavbu FAGS.
Treba poznamenať, že satelitné technológie nie je možné vždy použiť pri riešení tradičných geodetických úloh, napríklad relatívna presnosť definícií pre krátke vzdialenosti je nedostatočná, používanie GPS metód v presných inžiniering, proces záväzných referenčných bodov, ktorý je ľahko vyriešený tradičnou technológiou, sa stáva pomerne zložitým a nákladným, najmä v uzavretých oblastiach, v družicových technológiách, keďže objem satelitných definícií sa v tomto prípade viac ako zdvojnásobuje.
3. Chyba geodetických meraní (teória a riešenie problémov)
3.1 Geodetické meranie, výsledok merania, metódy a podmienky merania. Rovnaké a nelineárne merania
Meranie sa vzťahuje na proces porovnávania určitého fyzického množstva s inou hodnotou rovnakého mena, ktorá sa považuje za jednotku merania.
Jednotkou merania je hodnota fyzickej veličiny, ktorá sa použila na kvantifikáciu hodnoty rovnakého druhu.
Výsledok merania je číslo rovnajúce sa pomeru nameranej hodnoty jednotky merania.
Existujú nasledujúce typy geodetických meraní:
Lineárne, v dôsledku toho dostávajú šikmé iracionálne vzdialenosti medzi danými bodmi. Na tento účel sa používajú pásky, meracie pásky, drôty, optické a rádiové vzdialenosti.
Uhol, ktorý definuje veľkosť vodorovných uhlov. Vykonajte takéto merania pomocou teodolitu, kompasu, ekklimetrov.
Výška v dôsledku toho, ktoré dostávajú rozdiel vo výške jednotlivých bodov. Na tento účel používajte hladiny, teodolitové tachymetre, barometre.
Existujú dve metódy geodetických meraní: priame a priemerné (nepriame).
Priame merania, pri ktorých sú stanovené hodnoty získané ako výsledok priameho porovnania s meracou jednotkou.
Nepriama - merania, pri ktorých sú stanovené hodnoty získané ako funkcie iných priamo nameraných hodnôt.
Proces merania zahŕňa:
Objekt - ktorého vlastnosti, napríklad veľkosť, charakterizujú výsledok merania.
Technické prostriedky - dosiahnutie výsledku v určených jednotkách.
Metóda merania - vďaka teórii praktických akcií a technických prostriedkov.
Merač - záznamové zariadenie
Vonkajšie prostredie, v ktorom sa meria proces.
Merania rozlišujú medzi rovnými a nerovnými. Rovno - to sú výsledky meraní homogénnych veličín, vykonávaných nástrojmi tej istej triedy, rovnakou metódou, jedným výkonným umelcom za rovnakých podmienok. Ak sa aspoň jeden z prvkov, ktoré tvoria populáciu, zmení, výsledok merania je nerovný.
3.2 Klasifikácia chýb geodetických meraní. RMS chyba. Formy Gauss a Bessel pre jeho výpočet
Geodetické merania vykonávané dokonca za veľmi dobrých podmienok sú sprevádzané chybami, t.j. odchýlka výsledku merania L od skutočnej hodnoty X číslovaného množstva:
Pravda je hodnota merateľného množstva, ktoré by ideálne odrážalo kvantitatívne vlastnosti objektu. Nedosiahnuteľný stav - skutočná hodnota - je hypotetický pojem. To je hodnota, s ktorou možno pristupovať nekonečne blízko, nie je dosiahnuteľná.
Presnosť merania - stupeň aproximácie jeho výsledku na skutočnú hodnotu. Čím je chyba nižšia, tým vyššia je presnosť.
Absolútna chyba vyjadrené rozdielom hodnoty získanej ako výsledok merania a skutočného merania veľkosti. Napríklad skutočná hodnota l = 100 m, ale pri meraní tej istej čiary je výsledok 100,05 m, potom absolútna chyba:
E = Xeditoval – X
E = 100,05 - 100 = 0,05 (m)
Ak chcete získať hodnotu, stačí vykonať jedno meranie. Nazýva sa to nevyhnutne, ale častejšie nie sú obmedzené na jednu dimenziu, ale opakujú sa aspoň dva krát. Merania, ktoré presahujú rámec toho, čo je potrebné, sa nazývajú nadbytočné (doplňujúce), sú veľmi dôležitým prostriedkom na monitorovanie výsledku merania.
Absolútna chyba neposkytuje predstavu o presnosti výsledku. Napríklad chybu 0,06 m možno získať meraním l = 100 m alebo l = 1000 m. Preto sa vypočíta relatívna chyba:
C = Eporov / X
C = 0,06 / 100 = 1/1667, to znamená pri 1667 m meranej l bola vykonaná chyba 1 metr.
Relatívna chyba - pomer absolútnej chyby k skutočnej alebo nameranej hodnote. Expresná frakcia. Podľa inštrukcií by mala byť terénna čiara meraná nie hrubšie ako 1/1000.
Chyby vyplývajúce z jednotlivých faktorov sa nazývajú elementárne. Generalizovaná chyba je súčet základnej chyby.
K dispozícii sú:
drsné (Q),
systematické (o)
náhodný (Δ).
hrubý Chyby merania vznikajú v dôsledku hrubých neúspechov, chyby dodávateľa, jeho neopatrnosti, nepovšimnutých chýb technických prostriedkov. Hrubé chyby sú úplne neprijateľné a mali by byť úplne vylúčené z výsledkov meraní opakovanými dodatočnými meraniami.
systematický chyby merania - konštantná zložka spojená s poruchami: zrak, porucha technických prostriedkov, teplota. Systémové chyby môžu byť jednostranné a premenlivé (periodické chyby). Pokiaľ je to možné, hľadajú sa pri ich usporiadaní a vykonávaní práce, aby boli zohľadnené alebo vylúčené z výsledkov merania.
náhodný chyby merania nevyhnutne sprevádzajú všetky merania. Náhodné chyby nemožno vylúčiť, ale ich vplyv na požadovaný výsledok možno znížiť ďalšími meraniami. Toto sú najzábavnejšie chyby spojené so všetkými meraniami. Môžu sa líšiť veľkosti aj znamienka.
Ak možno hrubé a systematické chyby skúmať a vylúčiť z výsledku merania, potom sa na základe hlbokého merania môžu zohľadniť náhodné chyby. Štúdia založená na teórii pravdepodobnosti.
V praxi je obtiažnosť spočíva v tom, že merania sa vykonávajú obmedzený počet a preto sa odhaduje presnosť meraní, používa sa približný odhad strednej štvorcovej odchýlky, ktorý sa nazýva chyba rms.
Gaussovi bol navrhnutý vzorec pre strednú štvorcovú chybu:
Δ2cp = (Δ21 + Δ22 + ... + Δ2n) / n,
Δ2 = m2 = (Δ21 + Δ22 + ... + Δ2n) / n,
∆porov = m = √(∑∆ 2 ja / n)
Vzorec sa uplatňuje, keď sa chyby vypočítavajú z pravých hodnôt.
Besselov vzorec:
m = √(∑ V2 ja / (n-1))
Stredná štvorcová chyba aritmetického priemeru je n n krát menšia ako stredná štvorcová chyba jednotlivých meraní.
M =m/ Cn
Pri odhade sa používa štandardná chyba s hmotnosťou rovnajúcou sa jednej ako jednotke merania presnosti. Nazýva sa to stredná štvorcová chyba jednotky hmotnosti.
µ 2 = PBm2 - μ = mP, m = μ / P, t.j. stredná štvorcová chyba ktoréhokoľvek výsledku merania sa rovná chybe merania s hmotnosťou 1 μ) a delí druhou odmocninou hmotnosti tohto výsledku (P).
Pre dostatočne veľký počet meraní môžeme napísať Σm2P = ΣΔ2P (od Δ = m):
µ = √(∑(∆ 2 BP)/ n) , tj stredná štvorcová chyba merania s hmotnosťou rovnajúcou sa 1 sa rovná druhej odmocnine frakcie, ktorej čitateľ je súčet produktov absolútnych chybových štvorcov nerovnakých rozmerových meraní na ich hmotnosti a v menovateli počet nerovnomerných rozmerov.
Stredná štvorcová chyba celkového aritmetického priemeru podľa vzorca:
M0 = µ / √∑ P
Nahradením hodnoty μ získame:
M0 = √ (ΣΔ2ЧP / n) / (√ΣP) = √ [(ΣΔ2ЧP) / nČ (ΣP)]
M0 = √[ (∆ 1 2 P1 + ∆ 2 2 P2 +… + ∆ n2 Pn) / nH (P1 + P2 + … + Pn) ] – vzorecGauss, stredná štvorcová chyba celkového aritmetického priemeru sa rovná druhej odmocnine frakcie, ktorej čitateľ je súčet produktov štvorcov chýb nerovnakých rozmerov podľa ich váh a menovateľ je výsledkom počtu meraní súčtom ich váh.
µ = √ [∑(V2 BP) / (n-1)] Je to besselovho vzorca vypočítať aritmetickú priemernú chybu s meraním hmotnosti rovnajúcim sa 1 pre množstvo meraní, ktoré nie sú rovnocenné, s použitím ich pravdepodobných chýb. Platí pre veľký počet meraní a pre obmedzený (často v praxi) obsahuje chyby: mμ = μ / je spoľahlivosť odhadu μ.
Problém s testom 1
Na štúdium teodolitu opakovane meral rovnaký uhol. Výsledky boli nasledovné: 39,17,4 "; 39,16,8"; 39 ° 16,6 "; 39 ° 16,2"; 39,15,5 "; 39,15,8"; 39˚16,3 "; 39˚16,2". Rovnaký uhol bol meraný pomocou vysoko presného goniometrického zariadenia, ktoré poskytlo výsledok 39 4216 "42". Ak túto hodnotu použijete presne, vypočítajte štandardnú chybu štvorca, určite spoľahlivosť UPC, nájdite okrajovú chybu.
| Počet meraní | Výsledky merania, l |
chyby |
∆2 |
| 1 | 39˚17.4 " | +0.7" | 0.49 |
| 2 | 16.8 | +0.1 | 0.01 |
| 3 | 16.6 | -0.1 | 0.01 |
| 4 | 16.2 | -0.5 | 0.25 |
| 5 | 15.5 | -1.2 | 1.44 |
| 6 | 15.8 | -0.9 | 0.81 |
| 7 | 16.3 | -0.4 | 0.16 |
| 8 | 16.2 | -0.5 | 0.25 |
| súčet | 3.42 |
39˚16 "42" = 39˚16.7 "
Chyba RMS: m = √ ([Δ2 ] / n),
m = √ (3,42 / 8) = 0,65 ".
Hodnotenie spoľahlivosti UPC: mm = m / √2n,
mm = 0,65 / √16 = 0,1625 ≈ 0,16 ".
Chyba obmedzenia: ∆ atď. = 3Hm,
Δpr = 3 x 0,65 "= 1,96"
Test 2
Vzhľadom na súbor zvyškov trojúhelníkov triangulačný objem 50 jednotiek. Za predpokladu, že odchýlky sú pravdivé chyby, vypočítajte priemernú štvorcovú chybu a vytvoríte spoľahlivosť UPC, vypočítajte okrajovú chybu. Na tejto množine skontrolujte vlastnosť náhodných chýb:
Lim [Δ] / n = 0, za týmto účelom vypočítame W = [W] / n.
| N | W | N | W | N | W | N | W | N | W |
| 1 | +1,02 | 11 | -1,72 | 21 | -0,90 | 31 | +2,80 | 41 | -0,44 |
| 2 | +0,41 | 12 | +1,29 | 22 | +1,22 | 32 | -0,81 | 42 | -0,28 |
| 3 | +0,02 | 13 | -1,81 | 23 | -1,84 | 33 | +1,04 | 43 | -0,75 |
| 4 | -1,88 | 14 | -0,08 | 24 | -0,44 | 34 | +0,42 | 44 | -0,80 |
| 5 | -1,44 | 15 | -0,50 | 25 | +0,18 | 35 | +0,68 | 45 | -0,95 |
| 6 | -0,25 | 16 | -1,89 | 26 | -0,08 | 36 | +0,55 | 46 | -0,58 |
| 7 | +0,12 | 17 | +0,72 | 27 | -1,11 | 37 | +0,22 | 47 | +1,60 |
| 8 | +0,22 | 18 | +0,24 | 28 | +2,51 | 38 | +1,67 | 48 | +1,85 |
| 9 | -1,05 | 19 | -0,13 | 29 | -1,16 | 39 | +0,11 | 49 | +2,22 |
| 10 | +0,56 | 20 | +0,59 | 30 | +1,65 | 40 | +2,08 | 50 | -2,59 |
W = [W] / nW = + 2,51 / 50 = 0,05
Štandardná chyba v tomto prípade je vhodné vypočítať podľa vzorca: m = √ (- [W]2 / n) h (n-1),
m = √ (76,5703 - (2,512) / 50) h 49 = 1,249
Hodnotenie spoľahlivosti UPC podľa vzorca: mm = m / √2 (n-1),
mm = 1,249 / √ (2 * 49) = 0,13.
Hranica chyby podľa vzorca: ∆ atď. = 3Hm,
Dpr = 3,1,249 = 3,747.
Test 5
Určte vzdialenosť UPC vypočítanú vzorecom
S = √(x2 - x1) 2 + (y2 - y1) 2
ak x2 = 6,068,740 m; y2 = 431,295 m;
x1 = 6 068 500 m; y2 = 431,248 m;
mx = my = 0,1 m.
S = √(6 068 740 - 6 068 500)2 + (431 295 - 431 248)2 =235,36
mm = 0,1 / √4 = 0,05
Cieľ 6
Rovnaký uhol bol meraný päťkrát s výsledkami: 60 ° 41 "; 60 ° 40"; 60 ° 40 "; 60 ° 42"; 60˚41 "Vykonajte matematické spracovanie tejto série výsledkov merania.
| Nn / n | l, ˚ | ε, " | v, " | v2, " |
| 1 | 60˚41 " | 1 | -0,2 | 0,04 |
| 2 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 3 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 4 | 60 ° 42 " | 2 | -1,2 | 1,44 |
| 5 | 60˚41 " | 1 | -0,2 | 0,04 |
| súčet | 4 | 0 | 2,8 |
10 je minimálna hodnota nameranej veličiny, l0 = 60˚40 ", ε je zvyšok získaný ako ε = l1 - l0, L je najlepšia hodnota nameranej veličiny,
L = [l] / n; m = √ ([v2] / (n - 1), kde v je odchýlka od aritmetického priemeru M je odhad presnosti aritmetickej priemernej hodnoty M = m / √ n.
L = 60 ° 40 "+ 4/5 = 60 ° 40,8"
m = √2,8 / 4 = 0,7 "
M = 0,7 "/ √5 = 0,313"
Overovacia úloha 7
Vykonajte matematické spracovanie výsledkov merania planimetrom oblasti rovnakého obvodu: 26.31; 26.28; 26,32; 26,26; 26,31 ha.
| Nn / n | l, ha | ε, ha | v, ha | v2, ha |
| 1 | 26,31 | 0,05 | -0,014 | 0,000196 |
| 2 | 26,28 | 0,02 | +0,016 | 0,000256 |
| 3 | 26,32 | 0,06 | -0,024 | 0,000576 |
| 4 | 26,26 | 0 | 0,036 | 0,001296 |
| 5 | 26,31 | 0,05 | -0,014 | 0,000576 |
| súčet | 0,18 | 0 | 0,0029 |
L = 26,26 ± 0,18 / 5 = 26,296 ha
m = √0.0029 / 4 = 0,0269 ha
M = 0,0269 / √5 = 0,01204 ha
Verifikačná úloha 8
Pri štúdiu centimetrových rozdelení vyrovnávacej tyče pomocou ženevskej línie bola teplota určená v čase prijatia správy. Pri piatich centimetrových segmentoch boli získané nasledujúce hodnoty: 20,3 °; 19,9˚; 20,1˚; 20,2˚; 20,3˚. Vykonať matematické spracovanie výsledkov merania.
| Nn / n | l, ˚ | ε, ˚ | v, ˚ | v2, ˚ |
| 1 | 20,3 | 0,4 | -0,14 | 0,0196 |
| 2 | 19,9 | 0 | -0,26 | 0,0676 |
| 3 | 20,1 | 0,2 | -0,06 | 0,0036 |
| 4 | 20,2 | 0,3 | 0,04 | 0,0024 |
| 5 | 20,3 | 0,4 | 0,14 | 0,0196 |
| súčet | 1,3 | 0 | 0,1128 |
L = 19,9 ± 1,3 / 5 = 20,16 °
m = √0.1128 / 4 = 0.168˚
M = 0,168 / √5 = 0,075 °
3.3 Váhy merania
Meranie hmotnosti - toto je abstraktné číslo, nepriamo úmerné štvorcu výsledku merania UPC.
Váhový vzorec:
P = K / m2 ,
kde P je hmotnosť výsledku merania,
K je ľubovoľné konštantné číslo pre danú sériu meraní,
m - výsledok merania UPC.
Zo vzorca možno vidieť, že čím je meranie UPC menšie, tým je presnejšia a jeho hmotnosť je väčšia.
Pomer hmotností dvoch meraní je nepriamo úmerný štvorcom UPC týchto meraní, tj:
P1 / P2 = m22 / m12
Ak je počet meraní l1, l2, ..., ln, potom je zrejmé, že hmotnosť jedného merania bude nižšia ako hmotnosť aritmetického priemeru týchto hodnôt, tj:
kde m je chyba jednej dimenzie,
M je chyba aritmetickej strednej hodnoty.
Potom je pomer hmotností nepriamo úmerný pomeru štvorcov UPC:
PM / Pm = m2 / M2, M = m / √n;
PM / Pm = m2 / (m / √n) 2 = m2 / (m2 / n) = m2Hn / m2 = n.
Preto hmotnosť aritmetickej strednej hodnoty je viac ako jedna hodnota n krát. V dôsledku toho sa hmotnosť aritmetického centra rovná počtu rozmerov, z ktorých sa skladá.
Celkový aritmetický priemer meraní s nerovnakou hodnotou sa rovná zlomku, ktorého čitateľom je súčet produktov aritmetických stredných hodnôt výsledkov merania podľa ich hmotnosti a menovateľ je súčet všetkých váh merania. V dôsledku toho sa hmotnosť celkového aritmetického centra rovná súčtu váh merania nerovnomerného prúdu:
A0 = (a1P1 + a2P2 + ... + anPn) / (Pl + P2 + ... + Pn),
kde A0 je všeobecný aritmetický stred,
ai je výsledok jediného merania,
Pi je hmotnosť jedného merania.
CSP ktoréhokoľvek výsledku merania sa rovná chybe merania s hmotnosťou 1 delené od druhej odmocniny hmotnosti tohto výsledku, tj:
kde m je UPC akéhokoľvek výsledku merania;
M je chyba merania s hmotnosťou 1;
P je hmotnosť tohto výsledku merania.
Merania UPC s hmotnosťou 1 sa rovnajú druhému odmocninu frakcie, ktorej čitateľom je súčet produktov štvorcov absolútnych chýb nerovnomerných rozmerov na ich hmotnosti a v menovateli počet nerovnomerných rozmerov.
M = √ (ΣΔ2P / n),
kde Δ je absolútna chyba nelineárneho merania;
P je jeho hmotnosť;
n je počet meraní.
Overovacia úloha 9
Výsledky meraní uhla zodpovedajú m1 = 0,5; m2 = 0,7; m3 = 1,0. Vypočítajte hmotnosť výsledkov merania.
P = K / m2 ;
P1 = 1 / (0,5) 2 = 4;
P1 = 1 / (0,7) 2 = 2,04;
P1 = 1 / (1,0) 2 = 1.
Odpoveď: 4; 2,04; 1.
Overovacia úloha 11
Nájdite hmotnosť zvyšku v súčte uhlov trojuholníka, ak sú všetky uhly merané rovnako.
m = √ / (n-1), n = 3
m = √ [V21 + V22 + V23] / (3-1) = √ [V21 + V22 + V23] / 2
P = K / √ [V21 + V22 + V23] / 2 = 2 K / √ [V21 + V22 + V23]
3.4 Funkcie založené na výsledkoch meraní a posúdení ich presnosti
V praxi geodetických prác sa často požadované hodnoty získavajú ako výsledok výpočtov ako funkcia nameraných hodnôt. Výsledné hodnoty (výsledky) budú obsahovať chyby, ktoré závisia od typu funkcie a od chyby argumentov, pre ktoré sú vypočítané.
Pri opakovaných meraniach tej istej hodnoty získame rad podobných vzťahov:
Zmerala obidve strany všetkých rovníc a rozdelila súčet n:
(ΔU12 + ΔU22 + ... + ΔUn2) / n = k2 (Δl12 + Δl22 + ... + Δln2) / n;
ΣΔU2 / n = k2 (ΣΔl2 / n);
m = √ (ΣΔU2 / n);
kde mE - meranie vzdialenosti UPC.
Funkcia UPC produktu konštantnej hodnoty argumentom sa rovná konštantnej hodnote UPC argumentom.
Funkcia formy U = l1 + l2
Určte UPC, kde l1 a l2 sú nezávislé výrazy s náhodnými chybami Δl1 a Δl2. Potom suma U bude obsahovať chybu:
ΔU = Δl1 + Δl2.
Ak sa každá hodnota addenda meria n krát, môžeme si predstaviť:
ΔU1 = Δl1 "+ Δl2" - 1. dimenzia,
ΔU2 = Δl1 "+ Δl2" - 2. meranie,
…………………
ΔUn = Δl1 (n) + Δl2 (n) je n-té rozmer.
Po rozdelení oboch strán každej rovnosti ich pridáme termínom a rozdelíme ich n:
ΣΔU2 / n = (ΣΔ12) / n + 2 (ΣΔ1ΔΔ2) / n + (ΣΔ22) / n.
Keďže v dvojitom produkte Δl1 a Δl2 máme rôzne znaky, sú kompenzované a delené nekonečne veľkým počtom n, môžeme zanedbávať dvojitý produkt.
mU2 = ml12 + ml22;
mU = √ (ml12 + ml22).
Hodnota CSP súčtu dvoch nameraných hodnôt sa rovná druhej odmocnine súčtu štvorcov výrazu CSP.
Ak majú rovnaké termíny EUC, potom:
mU = √ (m2 + m2) = √2 m2 = m√2.
Vo všeobecnom prípade:
kde n je počet argumentov l.
Funkcia formy U = l1 - l2
mU = √ (ml12 + ml22).
UPC rozdielu medzi dvoma meraniami hodnôt sa rovná druhej odmocnine súčtu štvorcov UPC redukovanej a odčítanej.
Funkcia formy U = l1 - 12 + 13
mU = √ (ml12 + ml22 + ml32 ...)
UPC súčtu n nameraných hodnôt sa rovná odmocniny súčtu štvorcov UPC všetkých pojmov.
Lineárna funkcia formy U = k1l1 + k2l2 + ... + knln
mU = √ [(k1ml1) 2 + (k2ml2) 2 + ... + (knmln) 2],
tj UCS algebraického súčtu produktov s konštantnou hodnotou na argument sa rovná druhej odmocnine súčtu štvorcov produktov konštantnej hodnoty na UPC zodpovedajúceho argumentu.
Funkcia všeobecnej formy U = ƒ (11, 12, ..., ln)
Toto je najobecnejší prípad matematickej závislosti, vrátane všetkých vyššie uvedených funkcií, ktoré sú špeciálnym prípadom. To znamená, že argumenty l1, l2, ..., ln môžu byť dané ľubovoľnými rovnicami. Na určenie CSP takejto komplexnej funkcie je potrebné urobiť nasledovné:
1. Nájdite plný rozdiel funkcie:
dU = (dƒ / dl1) ddl1 + (dƒ / dl2) ddl2 + ... + (dƒ / dln) ddln,
kde (dƒ / dl1), (dƒ / dl2), ..., (dƒ / dln) sú čiastkové deriváty funkcie vzhľadom na každý argument.
2. Nahradiť diferenciály so štvorcami zodpovedajúceho UPC, ktoré vstupujú do štvorcových koeficientov pre tieto diferenciály:
mU2 = (dƒ / dl1) 2 μml12 + (dƒ / dl2) 2 μml22 + ... + (dƒ / dln) 2 μmln2.
3. Vypočítajte hodnoty čiastkových derivátov vzhľadom na hodnoty argumentov:
(dƒ / dl1), (dƒ / dl2), ..., (dƒ / dln).
A potom mU = √ [(dƒ / dl1) 2 × ml12 + (dƒ / dl2) 2 × ml22 + ... + (dƒ / dln) 2 × mln2].
CSP funkcie všeobecného tvaru sa rovná druhej odmocnine súčtu štvorcov produktov čiastkových derivátov pre každý argument na CSP príslušného argumentu.
3.5 Odhad presnosti založený na rozdieloch v dvojitých meraniach a rozdieloch v rozsahu a zákrutách.
V praxi prieskumu sa často dvakrát meria rovnaká hodnota. Napríklad strany priečnika v doprednom a opačnom smere, uhly dvoch polopriejímačov, výška - na čiernej a červenej strane míľnikov. Čím sú merania presnejšie, tým lepšia je konvergencia výsledkov v každej dvojici.
mlsr. = Ѕ √ Σd2 / n
kde d je rozdiel v každom páre; n je počet rozdielov.
Besselov vzorec:
mlsr = Ѕ √ Σd2 / n-1
Ak merania musia spĺňať niektoré geometrické podmienky, napríklad súčet vnútorných uhlov trojuholníka musí byť 180, potom presnosť meraní môže byť určená z rezíduí vyplývajúcich z chýb merania.
μ =√∑ [ f2 / n]/ N,
kde - UPC s jedným uhlom;
f - reziduálna v polygóne;
N je počet polygónov;
n je počet rohov v polygóne.
4. Definícia ďalších položiek
4.1 Účel a metódy určovania ďalších položiek
Ďalšie body sú určené spolu s filmovou sieťou predovšetkým na zahustenie existujúcej geodetickej siete s filmovými bodmi. Sú postavené priamo, spätne, v kombinácii a za prítomnosti elektronických diaľkomerov - lineárnej sérii a metódou lúčov.
V niektorých prípadoch je ďalší bod určený prenosom (demoláciou) súradníc z hornej časti označenia na zem.
4.2 Premiestnenie súradníc z hornej časti označenia na zem. (Príkladový roztok)
Počas výroby topografických a geodetických prác v mestských podmienkach nie je možné vytvoriť teodolit v bode geodetickej siete (ide o kostol, anténu atď.). Potom je potrebné zničiť súradnice triangulačného bodu na zemi, aby sa zabezpečila výroba geodetických prác v oblasti.
Základná os: Bod A so súradnicami XA, YA; geodetické siete B (XB, YB) a C (XC, YC).
Merania vodorovných uhlov I1, I "1, I2, I" 2, b, b ".
Je potrebné nájsť súradnice bodu P - XP, YP.
Riešenie problému je rozdelené na nasledujúce etapy:
Riešenie číselného príkladu
Surové dáta
DAR výpočet vzdialenosti
Inverzné riešenie problémov
Výpočet smerových uhlov αAR = αD
sin ψ = D xsinb / S AB; sin = 174,52CH0,66179 / 3068,48 = 0,03950;
sin ψ "= DČsinb" / S АС; sin = 174,52CH0,95061 / 5275,51 = 0,03292;
ψ = arcsin 0,03950 = 2 o15` 50``;
ψ "= arcsin 0,03292 = 1 o53` 13``;
φ = 180 o - (b + ψ) = 180 o - (138o33` 49`` + 2 o15` 50``) = 39o10` 41``
φ = 180 o - (b` + ψ`) = 180 o - (71o55` 02`` + 1 o53` 13``) = 106 o11` 46``
αD = αAB ± φ = 329o07` 55`` + 39o10` 41` = 8o18` 36``
αD` = αAC ± φ` = 262o07` 51`` + 106 o11` 46`` = 8o18` 37``
ovládanie:
(αD - α "D) xmβ;
kde mβ je meranie FSC vodorovných uhlov.
Znak "+" alebo "-" vo vzorcoch na výpočet smerového uhla sa prijíma v závislosti od relatívnej polohy bodov A, P, B a C.
(8o18` 36``-8o18` 37``) ≤ 30``
0o00` 01`` ≤ 30``
Riešenie priamych problémov (výpočet súradníc tp)
Xp = XA + AX, Yp = YA + ΔY,
X "p = XA + ΔX", Y "p = YA + ΔY".
ΔX = DcosαD, ΔY = DsinαD,
ΔX "= Dcosα" D, ΔY "= Dsinα" D.
Rozdielnosť súradníc by nemala presiahnuť hodnotu hmYaHp, kde p = 206265 ", mI - štandardná chyba merania uhla.
Posudzovanie presnosti určovania polohy bodu P.
Štandardná chyba definície jednej položky sa vypočíta podľa vzorca:
M2p = m2X + m2Y, M2p = m2D + (D × mα / P) 2
kde mD - je určená presnosťou lineárnych meraní a m α - presnosťou uhlových meraní.
Príklad: mD = 2 cm, mα = 5``, potom
Mp = √ [(0,02) 2+ (170 × 5/2 × 1010) 2] ≈ 2 × 10-2 = 0,02 m.
4.3 Riešenie priamej a reverznej resekcie (pre variant úlohy)
Určenie súradníc bodov pätinou (Youngovho vzorca).
Pri jednorazovej sérii musíte mať dva pevné body. Kontrola stanovenia sa uskutočňuje sekundárnym sérom z tretieho pevného bodu.
Východisko: pevné odseky A (XAYA); B (XBYB); C (CHC).
Merania v teréne: horizontálne uhly β1, β2, β`1, β2.
Položka P. je určená.
Vzorce na riešenie problému:
Xp-XA = ((XB-XA) ctgp1 + (YB-YA)) / (ctgp1 + ctgp2);
Xp = XA + AXA;
Yp-YA = ((YB-YA) ctgp1 + (XB-XA)) / (ctgp1 + ctgB2); Yp = YA + ΔYA;
Posúdenie presnosti určovania položky P.
Výpočet UPC z 1. a 2. definície:
M1 = (mbČ (S12 + S22)) / pČsin1;
M2 = (m ß √ (S12 + S22)) / pČsinγ2;
Hodnoty zahrnuté vo vyššie uvedených vzorcoch sú nasledujúce:
mβ = 5``, p = 206265``; γ = 73 ° 15,9 °; γ = 62 ° 55,7 °; S1 = 1686,77 m; S2 = 1639,80 m; S3 = 2096,62 m.
Bočné serify sa nachádzajú pri riešení inverzných problémov.
M1 = (5''Ч√2,86 + 2,69) / (2M105Č0,958) = 0,06 m.
M2 = (5''Ч√, 69 + 4,41) / (2 × 105 × 0,890) = 0,07m.
Pán = √ (M12 + M22); Mr = √ [(0,06) 2+ (0,07) 2] = 0,09 m.
Rozdiel medzi súradnicami dvoch definícií
r = √ [(Xp-X`p) 2+ (Yp-Y`p) 2] nesmie prekročiť hodnotu 3 Mr;
r = √ [(2833.82-2833.82) 2+ (2116.38-2116.32) 2] = √0.0036 = 0.06 m.
Na základe nerovnosti r = 0,06 m 3 × 0,09 m je logické usúdiť, že definícia bodu P. je kvalitatívna.
Pre konečné hodnoty súradníc je priemer oboch definícií.
Riešenie číselného príkladu
|
|
(XB-XA) ctgp1 |
|
||||
| XB- XA | YB-YA | |||||
| ctg β1 + ctg β2 4133,41 Fyzické a geografické charakteristiky oblasti návrhu. Charakteristika hlavného geodetického rámca. Geometrické parametre kurzu (založené na riešení inverzných geodetických problémov). Kritériá pre predĺženie. Výpočet presnosti polygonometrického kurzu. Prehľad objektov hospodárenia s pozemkami a oznamovanie osôb, ktorých práva môžu byť počas ich vykonávania ovplyvnené. Určovanie hraníc predmetu hospodárenia s pozemkami v teréne, ich koordinácia a konsolidácia. Štátna, referenčná a prieskumná geodetická sieť. Výber metód streľby a vytvárania geodetického rámca. Plánovaná nadstavba leteckých fotografií a ich interpretácia. Vypracovanie plánu na zlepšenie efektívnosti práce. Definícia poľných cieľov. Výpočet množstva práce na objekte. Hlavné typy geodetických výkresov. Rozlišovacie znaky plánu a máp. Základné overovanie a nastavenie teodolitu. Podstata geodetického štúdia. Geodetická podpora pre inštaláciu stĺpov v pohároch základov. Vertikálne zarovnanie stĺpcov. Metódy topografického prieskumu. Teodolit T-30 a pracujte s ním. Teodolitové vyrovnávanie. Mensal shooting. Nivelačné plochy. Tachometrický prieskum. Riešenie technických problémov v pláne. Porovnávacia analýza metód topografického prieskumu. V tejto publikácii sú zhrnuté skúsenosti s používaním satelitných geodéznych metód na monitorovanie geodynamických procesov vyskytujúcich sa v ťažobných podnikoch. Teória rôznych metód trigonometrického vyrovnávania. Chyby trigonometrického vyrovnávania v závislosti od presnosti meraných vzdialeností. Geodetické metódy na určenie vyvýšenia stredísk bodov štátnej geodetickej siete. Účel predbežných výpočtov v polygonometrii. Výpočet pracovných súradníc. Vyrovnanie uhlových a lineárnych veličín. Výpočet hmotností upravených hodnôt súradníc uzlových bodov. Odhad presnosti meraní v teréne a výpočet súradníc uzlových bodov Elektronické celkové stanice: typy, princíp prevádzky, hlavné výhody, aplikácie a štandardné aplikačné úlohy. Kontrola úplnej elektronickej stanice. Príprava tachymetra pre tachometrické vyšetrenie a spracovanie výsledkov meraní. Technika, ktorá umožňuje použitie opakujúceho sa algoritmu na kontrolu hrubých chýb a následné vyrovnanie geodetických sietí pri pozorovaní deformácií inžinierskych štruktúr a zemského povrchu. Blok programu na analýzu plánovaných deformácií. Posúdenie spôsobov vytvárania pôdy (oddiel, rozdelenie, asociácia, prerozdeľovanie) a štátna regulácia práva na vlastníctvo. Získavanie základov registrácie katastra. Popis procesu vytvárania plánovanej geodetickej siete. Osvojenie si metódy matematického spracovania výsledkov geodetických meraní v zahusťovacích sieťach. Výpočet súradníc ďalších bodov definovaných priamymi a inverznými viacnásobnými rohovými patkami. Vyrovnanie polygonometrického systému. Zoznámenie sa s geodetickými nástrojmi. Konštrukčné vlastnosti teodolitu 4T30, úroveň 3Н-5Л a elektronická celková stanica 3Ta5. Geometrické, trigonometrické, hydrostatické, barometrické vyrovnanie. Automatický tachometrický prieskum. Charakteristika znakov upevňovania geodetických sietí, ich klasifikácia podľa hodnoty, umiestnenie, ich označenie v teréne. Rezidenčné, verejné, priemyselné budovy. Etapy výroby geodetických prác počas výstavby objektu. Balančná triangulácia, systémy pohybov plánovanej siete prieskumov, teodolit sa pohybuje s jedným uzlovým bodom a uhly siete teodolitov a polygonometrických pohybov pomocou postupných aproximácií. Schéma na výpočet smerových uhlov referenčných čiar. |
3.2 Klasifikácia chýb geodetických meraní. RMS chyba. Formy Gauss a Bessel pre jeho výpočet
Geodetické merania vykonávané dokonca za veľmi dobrých podmienok sú sprevádzané chybami, t.j. odchýlka výsledku merania L od skutočnej hodnoty X číslovaného množstva:
Pravda je hodnota merateľného množstva, ktoré by ideálne odrážalo kvantitatívne vlastnosti objektu. Nedosiahnuteľný stav - skutočná hodnota - je hypotetický pojem. To je hodnota, s ktorou možno pristupovať nekonečne blízko, nie je dosiahnuteľná.
Presnosť merania - stupeň aproximácie jeho výsledku na skutočnú hodnotu. Čím je chyba nižšia, tým vyššia je presnosť.
Absolútna chyba je vyjadrená rozdielom hodnoty získanej ako výsledok merania a skutočného merania veľkosti. Napríklad skutočná hodnota l = 100 m, ale pri meraní tej istej čiary je výsledok 100,05 m, potom absolútna chyba:
E = X je X-X
E = 100,05 - 100 = 0,05 (m)
Ak chcete získať hodnotu, stačí vykonať jedno meranie. Nazýva sa to nevyhnutne, ale častejšie nie sú obmedzené na jednu dimenziu, ale opakujú sa aspoň dva krát. Merania, ktoré presahujú rámec toho, čo je potrebné, sa nazývajú nadbytočné (doplňujúce), sú veľmi dôležitým prostriedkom na monitorovanie výsledku merania.
Absolútna chyba neposkytuje predstavu o presnosti výsledku. Napríklad chybu 0,06 m možno získať meraním l = 100 m alebo l = 1000 m. Preto sa vypočíta relatívna chyba:
C = 0,06 / 100 = 1/1667, to znamená pri 1667 m meranej l bola vykonaná chyba 1 metr.
Relatívna chyba - pomer absolútnej chyby k skutočnej alebo nameranej hodnote. Expresná frakcia. Podľa inštrukcií by mala byť terénna čiara meraná nie hrubšie ako 1/1000.
Chyby vyplývajúce z jednotlivých faktorov sa nazývajú elementárne. Generalizovaná chyba je súčet základnej chyby.
K dispozícii sú:
· Hrubý (Q),
· Systematické (O),
· Náhodný (Δ).
Hrubé chyby merania vznikajú v dôsledku chyby, chyby dodávateľa, jeho nedbanlivosti, nepovšimnutých chýb technických prostriedkov. Hrubé chyby sú úplne neprijateľné a mali by byť úplne vylúčené z výsledkov meraní opakovanými dodatočnými meraniami.
Systematické chyby merania - konštantná zložka spojená s poruchami: zrak, porucha technických prostriedkov, teplota. Systémové chyby môžu byť jednostranné a premenlivé (periodické chyby). Pokiaľ je to možné, hľadajú sa pri ich usporiadaní a vykonávaní práce, aby boli zohľadnené alebo vylúčené z výsledkov merania.
Náhodné meracie chyby nevyhnutne sprevádzajú všetky merania. Náhodné chyby nemožno vylúčiť, ale ich vplyv na požadovaný výsledok možno znížiť ďalšími meraniami. Toto sú najzábavnejšie chyby spojené so všetkými meraniami. Môžu sa líšiť veľkosti aj znamienka.
Ak možno hrubé a systematické chyby skúmať a vylúčiť z výsledku merania, potom sa na základe hlbokého merania môžu zohľadniť náhodné chyby. Štúdia založená na teórii pravdepodobnosti.
V praxi je obtiažnosť spočíva v tom, že merania sa vykonávajú obmedzený počet a preto sa odhaduje presnosť meraní, používa sa približný odhad štandardnej odchýlky, ktorý sa nazýva chyba RMS.
Gaussovi bol navrhnutý vzorec pre strednú štvorcovú chybu:
Δ 2 cf = (Δ 2 1 + Δ 2 2 + ... + Δ 2 n) / n,
Δ 2 = m 2 = (Δ 2 1 + Δ 2 2 + ... + Δ 2 n) / n,
Δ cf = m = √ (Σ Δ 2 i / n)
Vzorec sa uplatňuje, keď sa chyby vypočítavajú z pravých hodnôt.
Besselov vzorec:
m = √ (ΣV 2 i / (n-1))
RMS chyba aritmetického priemeru je Ön krát menšia ako je rms chyba jednotlivého merania.
Pri odhade sa používa štandardná chyba s hmotnosťou rovnajúcou sa jednej ako jednotke merania presnosti. Nazýva sa to stredná štvorcová chyba jednotky hmotnosti.
μ 2 = P × m 2 - μ = m √ P, m = μ / P, t.j. stredná štvorcová chyba ktoréhokoľvek výsledku merania sa rovná chybe merania s hmotnosťou 1 μ) a delí druhou odmocninou hmotnosti tohto výsledku (P).
Pre dostatočne veľký počet meraní môžeme napísať Σm 2 P = ΣΔ 2 P (od Δ = m):
μ = √ (Σ (Δ 2 × P) / n), t.j. stredná štvorcová chyba merania s hmotnosťou rovnajúcou sa 1 sa rovná druhej odmocnine frakcie, ktorej čitateľ je súčet produktov absolútnych chybových štvorcov nerovnakých rozmerových meraní na ich hmotnosti a v menovateli počet nerovnomerných rozmerov.
Stredná štvorcová chyba celkového aritmetického priemeru podľa vzorca:
M 0 = μ / √ ΣP
Nahradením hodnoty μ získame:
M 0 = √ (ΣΔ 2 × P / n) / (√ΣP) = √ [(ΣΔ 2 × P) / n × (ΣP)]
M 0 = √ [(Δ 1 2 P 1 + Δ 2 2 P 2 + ... + Δ n 2 P n) / n × (P 1 + P 2 + ... + P n)] je Gaussov vzorec, priemerná kvadratická chyba aritmetické centrum sa rovná druhej odmocnine frakcie, ktorej čitateľom je súčet produktov štvorcov chýb meraní nerovnomerného prúdu pre ich hmotnosť a menovateľ je výsledkom počtu meraní pre súčet ich hmotností.
μ = √ [Σ (V 2 × P) / (n-1)] Toto je Besselov vzorec na výpočet aritmetickej priemernej chyby s meraním hmotnosti 1 pre sériu meraní s nerovnakou dĺžkou na základe ich pravdepodobných chýb. Platí pre veľký počet meraní a pre obmedzený (často v praxi) obsahuje chyby: m μ = μ / je spoľahlivosť odhadu μ.
Problém s testom 1
Na štúdium teodolitu opakovane meral rovnaký uhol. Výsledky boli nasledovné: 39,17,4 "; 39,16,8"; 39 ° 16,6 "; 39 ° 16,2"; 39,15,5 "; 39,15,8"; 39˚16,3 "; 39˚16,2". Rovnaký uhol bol meraný pomocou vysoko presného goniometrického zariadenia, ktoré poskytlo výsledok 39 4216 "42". Ak túto hodnotu použijete presne, vypočítajte štandardnú chybu štvorca, určite spoľahlivosť UPC, nájdite okrajovú chybu.
| Počet meraní | Výsledky merania, l | chyby | ∆2 |
| 1 | 39˚17.4 " | +0.7" | 0.49 |
| 2 | 16.8 | +0.1 | 0.01 |
| 3 | 16.6 | -0.1 | 0.01 |
| 4 | 16.2 | -0.5 | 0.25 |
| 5 | 15.5 | -1.2 | 1.44 |
| 6 | 15.8 | -0.9 | 0.81 |
| 7 | 16.3 | -0.4 | 0.16 |
| 8 | 16.2 | -0.5 | 0.25 |
| súčet | 3.42 |
39˚16 "42" = 39˚16.7 "
Chyba RMS: m = √ ([Δ 2] / n),
m = √ (3,42 / 8) = 0,65 ".
Hodnotenie spoľahlivosti UPC: m m = m / √2n,
m m = 0,65 / √16 = 0,1625 ≈ 0,16 ".
Chyba hranice: Δ pr = 3 × m,
Δ pr = 3 x 0,65 "= 1,96"
Test 2
Vzhľadom na súbor zvyškov trojúhelníkov triangulačný objem 50 jednotiek. Za predpokladu, že odchýlky sú pravdivé chyby, vypočítajte priemernú štvorcovú chybu a vytvoríte spoľahlivosť UPC, vypočítajte okrajovú chybu. Na tejto množine skontrolujte vlastnosť náhodných chýb:
Lim [Δ] / n = 0, za týmto účelom vypočítame W = [W] / n.
| N | W | N | W | N | W | N | W | N | W |
| 1 | +1,02 | 11 | -1,72 | 21 | -0,90 | 31 | +2,80 | 41 | -0,44 |
| 2 | +0,41 | 12 | +1,29 | 22 | +1,22 | 32 | -0,81 | 42 | -0,28 |
| 3 | +0,02 | 13 | -1,81 | 23 | -1,84 | 33 | +1,04 | 43 | -0,75 |
| 4 | -1,88 | 14 | -0,08 | 24 | -0,44 | 34 | +0,42 | 44 | -0,80 |
| 5 | -1,44 | 15 | -0,50 | 25 | +0,18 | 35 | +0,68 | 45 | -0,95 |
| 6 | -0,25 | 16 | -1,89 | 26 | -0,08 | 36 | +0,55 | 46 | -0,58 |
| 7 | +0,12 | 17 | +0,72 | 27 | -1,11 | 37 | +0,22 | 47 | +1,60 |
| 8 | +0,22 | 18 | +0,24 | 28 | +2,51 | 38 | +1,67 | 48 | +1,85 |
| 9 | -1,05 | 19 | -0,13 | 29 | -1,16 | 39 | +0,11 | 49 | +2,22 |
| 10 | +0,56 | 20 | +0,59 | 30 | +1,65 | 40 | +2,08 | 50 | -2,59 |
W = [W] / n, W = + 2,51 / 50 = 0,05
Štandardná chyba v tomto prípade sa odporúča vypočítať pomocou vzorca: m = √ (- [W] 2 / n) ÷ (n-1),
m = √ (76,5703 - (2,51 2) / 50) ÷ 49 = 1,249
Hodnotenie spoľahlivosti UPC pomocou vzorca: m m = m / √2 (n-1),
m m = 1,249 / √ (2 x 49) = 0,13.
Limitná chyba podľa vzorca: Δ pr = 3 × m,
Δ pr = 3 x 1,249 = 3,747.
Kontrolná úloha 5 Určte vzdialenosť UPC vypočítanú vzorecom
S = √ (x 2 - x 1) 2 + (y 2 - y 1) 2
ak x 2 = 6 068 740 m; y2 = 431,295 m;
x 1 = 6 068 500 m; y2 = 431 248 m;
m x = m y = 0,1 m.
S = √ (6 068 740 - 6 068 500) 2 + (431 295 - 431 248) 2 = 235,36
m m = 0,1 / √4 = 0,05
Cieľ 6
Rovnaký uhol bol meraný päťkrát s výsledkami: 60 ° 41 "; 60 ° 40"; 60 ° 40 "; 60 ° 42"; 60˚41 "Vykonajte matematické spracovanie tejto série výsledkov merania.
| Nn / n | l, ˚ | ε, " | v, " | v2, " |
| 1 | 60˚41 " | 1 | -0,2 | 0,04 |
| 2 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 3 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 4 | 60 ° 42 " | 2 | -1,2 | 1,44 |
| 5 | 60˚41 " | 1 | -0,2 | 0,04 |
| súčet | 4 | 0 | 2,8 |
l 0 je minimálna hodnota meranej veličiny, l 0 = 60˚40 ", ε je zvyšok získaný ako ε = l 1 - l 0, L je najlepšia hodnota nameranej veličiny,
L = [l] / n; kde m je odchýlka od aritmetického priemeru, M je odhad presnosti aritmetickej priemernej hodnoty, M = m / √ n.
L = 60 ° 40 "+ 4/5 = 60 ° 40,8"
m = √2,8 / 4 = 0,7 "
M = 0,7 "/ √5 = 0,313"
Overovacia úloha 7
Vykonajte matematické spracovanie výsledkov merania planimetrom oblasti rovnakého obvodu: 26.31; 26.28; 26,32; 26,26; 26,31 ha.
| Nn / n | l, ha | ε, ha | v, ha | v2, ha |
| 1 | 26,31 | 0,05 | -0,014 | 0,000196 |
| 2 | 26,28 | 0,02 | +0,016 | 0,000256 |
| 3 | 26,32 | 0,06 | -0,024 | 0,000576 |
| 4 | 26,26 | 0 | 0,036 | 0,001296 |
| 5 | 26,31 | 0,05 | -0,014 | 0,000576 |
| súčet | 0,18 | 0 | 0,0029 |
L = 26,26 ± 0,18 / 5 = 26,296 ha
m = √0.0029 / 4 = 0,0269 ha
M = 0,0269 / √5 = 0,01204 ha
Verifikačná úloha 8
Pri štúdiu centimetrových rozdelení vyrovnávacej tyče pomocou ženevskej línie bola teplota určená v čase prijatia správy. Pri piatich centimetrových segmentoch boli získané nasledujúce hodnoty: 20,3 °; 19,9˚; 20,1˚; 20,2˚; 20,3˚. Vykonať matematické spracovanie výsledkov merania.
| Nn / n | l, ˚ | ε, ˚ | v, ˚ | v2, ˚ |
| 1 | 20,3 | 0,4 | -0,14 | 0,0196 |
| 2 | 19,9 | 0 | -0,26 | 0,0676 |
| 3 | 20,1 | 0,2 | -0,06 | 0,0036 |
| 4 | 20,2 | 0,3 | 0,04 | 0,0024 |
| 5
Nebudú potrebné, nástroj sa musí vyvinúť ručne, ak je to odôvodnené z hľadiska času stráveného a materiálnych zdrojov. 2. Spracovanie geodetických meraní pomocou tabuliek Pre prvotné spracovanie informácií získaných v dôsledku komplexu topografických a geodetických prác som použil program TOGI, ktorý je balíkom ...
Na stavenisku je potrebné dodržiavať požiadavky noriem a pravidiel bezpečnosti opísaných v kapitole SNiP Sh-4-80 "Bezpečnosť v stavebníctve" a pokyny oddelenia. Osoby, ktoré dostali príkaz na vykonanie stavebného manažmentu, môžu vykonávať geodetické práce. Riziko poranenia alebo poranenia sa určuje v závislosti od podmienok pracovníka ...
Elektronické zariadenia s priamou účasťou autora. Druhá kapitola V druhej kapitole sú preskúmané vyvinuté metódy výskumu metrologických zariadení a lavíc pre kontrolu a kalibráciu geodetických prístrojov na meranie výšok. Metóda skúmania krátkodobej chyby merania zvislých uhlov geodetických prístrojov. Dôležitá úloha v štúdiu ... |
SPRACOVANIE VÝSLEDKOV MERANIA
Vo fyzickej praxi
Merania a chyby merania
Fyzika je experimentálna veda, čo znamená, že fyzické zákony sú založené a overené zhromažďovaním a porovnávaním experimentálnych údajov. Účelom fyzickej dielne je naučiť sa zo skúsenosti hlavné fyzikálne javy, naučiť sa správne merať číselné hodnoty fyzických veličín a porovnať ich s teoretickými receptami.
Všetky merania sa dajú rozdeliť na dva typy - priamkya nepriamy.
na priamy merania sa hodnota požadovanej hodnoty získa priamo z údajov meracieho prístroja. Napríklad dĺžka sa meria pravítkom, časom za hodinu atď.
Ak požadovaná fyzická veličina nemôže byť meraná priamo zariadením a je vyjadrená prostredníctvom vzorca prostredníctvom nameraných hodnôt, potom sa takéto merania nazývajú nepriamy.
Meranie akejkoľvek hodnoty nedáva absolútne presnú hodnotu tejto hodnoty. Každé meranie vždy obsahuje nejakú chybu (chyba). Chyba je rozdiel medzi nameranou a skutočnou hodnotou.
Chyby sa zvyčajne delia na systematický a náhodný.
systematický volajte chybu, ktorá zostáva konštantná v celej sérii meraní. Takéto chyby sú spôsobené nedokonalosťou meradla (napríklad nulová odchýlka zariadenia) alebo metódou merania a môžu byť v zásade vylúčené z konečného výsledku zavedením vhodnej korekcie.
Medzi systematické chyby patrí aj chyba meracích zariadení. Presnosť akéhokoľvek nástroja je obmedzená a je charakterizovaná jeho triedou presnosti, ktorá je spravidla uvedená na meracej stupnici.
náhodný nazýva sa chyba, ktorá sa líši v rôznych pokusoch a môže byť pozitívna aj negatívna. Náhodné chyby sú spôsobené príčinami, ktoré závisia od meracieho zariadenia (trenie, medzery atď.) A vonkajších podmienok (vibrácie, kolísanie napätia v sieti atď.).
Náhodné chyby nemožno empiricky vylúčiť, ale ich vplyv na výsledok je možné znížiť opakovanými meraniami.
PRIEMERNÁ HODNOTA A PRIEMERNÁ ABSOLUTNÁ CHYBA.
Predpokladajme, že vykonáme sériu meraní veľkosti X. Vzhľadom na prítomnosť náhodných chýb dostaneme n rôzne hodnoty:
X1, X2, X3 ... Xn
Priemerná hodnota sa zvyčajne považuje za výsledok merania.
Rozdiel medzi priemerom a výsledkom i -miera merania sa nazýva absolútna chyba tohto merania.
Ako miera chyby priemeru sa môže prijať priemerná hodnota absolútnej chyby individuálneho merania
 (2)
(2)
hodnota  sa nazýva aritmetická stredná (alebo stredná absolútna) chyba.
sa nazýva aritmetická stredná (alebo stredná absolútna) chyba.
Výsledok merania by mal byť napísaný ako
 (3)
(3)
Na charakterizáciu presnosti meraní je relatívna chyba, ktorá sa zvyčajne vyjadruje ako percento
 (4)
(4)
PRIEMERNÁ ŠKRAČNÁ CHYBA.
Pri kritických meraniach, ak je potrebné poznať spoľahlivosť získaných výsledkov, sa použije štandardná chyba (alebo štandardná odchýlka), ktorá je určená vzorcom
 (5)
(5)
Hodnota charakterizuje odchýlku jednej jednotky od skutočnej hodnoty.
Ak sme vypočítali n merania znamenajú  pomocou vzorca (2), bude táto hodnota presnejšia, to znamená, že sa bude líšiť od skutočnej hodnoty ako každej individuálnej dimenzie. Stredná štvorcová chyba priemeru
pomocou vzorca (2), bude táto hodnota presnejšia, to znamená, že sa bude líšiť od skutočnej hodnoty ako každej individuálnej dimenzie. Stredná štvorcová chyba priemeru  je
je
 (6)
(6)
kde je rms chyba každého jednotlivého merania, n - počet meraní.
Takže zvýšením počtu experimentov možno znížiť náhodnú chybu v strednej hodnote.
V súčasnosti sú výsledky vedeckých a technických meraní zvyčajne prezentované vo forme
 (7)
(7)
Ako ukazuje teória, s takýmto záznamom poznáme spoľahlivosť získaného výsledku, konkrétne skutočnú hodnotu X68% pravdepodobne bude odlišné nie viac ako .
Pri použití aritmetickej strednej (absolútnej) chyby (vzorec 2) sa nemožno povedať o spoľahlivosti výsledku. Určitá myšlienka presnosti meraní v tomto prípade dáva relatívnu chybu (vzorec 4).
Pri vykonávaní laboratórnej práce môžu študenti používať strednú absolútnu chybu a priemernú štvorcovú chybu. Ktorý z nich sa bude aplikovať, je uvedený priamo v každej konkrétnej práci (alebo indikovaný učiteľom).
Obvykle, ak počet meraní nepresiahne 3 - 5, potom sa môže použiť priemerná absolútna chyba. Ak je počet meraní približne 10 alebo viac, potom by sa mal použiť správnejší odhad s použitím strednej štvorcovej chyby priemeru (vzorce 5 a 6).
ÚČET SYSTÉMOVÝCH CHÝB.
Zvýšením počtu meraní možno znížiť len náhodné chyby skúseností, ale nie sú systematické.
Maximálna hodnota systémovej chyby sa zvyčajne uvádza na zariadení alebo v pasu. Pri meraniach s použitím bežného kovového pravítka je systematická chyba aspoň 0,5 mm; pre merania pomocou kalibru -
0,1 až 0,05 mm; mikrometr - 0,01 mm.
Často polovica ceny divízie nástrojov sa považuje za systematickú chybu.
Váhy elektrických meracích prístrojov udávajú triedu presnosti. Keď je známa trieda presnosti K, je možné vypočítať systematickú chybu prístroja ΔΧ vzorcom
kde K je trieda presnosti prístroja, X pr je limitná hodnota, ktorú možno merať na mierke nástroja.
Takže trieda 0,5 ampér so stupnicou až do 5A meria prúd s chybou nie viac ako

Chyba digitálneho zariadenia sa rovná jednotke s najmenšou zobrazenou číslicou.
Priemerná hodnota celkovej chyby pozostáva z náhodnýa systematickýchyby.

Odpoveď so systematickými a náhodnými chybami sa zaznamená vo formulári
CHYBY NEPRIAMEHO MERANIA
Vo fyzických experimentoch sa často stáva, že požadované fyzické množstvo samo o sebe nemožno merať skúsenosťou, ale je funkciou iných meraných veličín priamo. Na stanovenie objemu valca je napríklad potrebné merať priemer D a výšku hoda potom vypočítajte objem pomocou vzorca
hodnota Da hodbude meraná s určitou chybou, a preto vypočítaná hodnota V bude to tiež s niektorými chybami. Musíte byť schopní vyjadriť chybu vypočítanej hodnoty prostredníctvom chýb nameraných hodnôt.
Rovnako ako pri priamych meraniach je možné vypočítať priemernú absolútnu (aritmetickú priemernú) chybu alebo strednú štvorcovú chybu.
Všeobecné pravidlá pre výpočet chýb pre oba prípady sú odvodené pomocou diferenciálneho počtu.
Nech je požadovaná hodnota φ funkciou niekoľkých premenných X, Y,Z…
φ( X, Y,Z…).
Pomocou priamych meraní môžeme nájsť hodnoty  a tiež vyhodnotiť ich priemerné absolútne chyby
a tiež vyhodnotiť ich priemerné absolútne chyby  ... alebo stredné štvorcové chyby X, Y, Z ...
... alebo stredné štvorcové chyby X, Y, Z ...
Potom sa vypočíta aritmetická priemerná chyba podľa vzorca

kde  - čiastkové deriváty φ φ X, Y,Z.
Vypočítavajú sa pre priemerné hodnoty …
- čiastkové deriváty φ φ X, Y,Z.
Vypočítavajú sa pre priemerné hodnoty …
Stredná štvorcová chyba sa vypočíta podľa vzorca
Príklad.Odvodíme chybné vzorce na výpočet objemu valca.
a) Aritmetická priemerná chyba.
hodnota D a hod merané zodpovedajúcim spôsobom s chybou D a h.
b) Stredná štvorcová chyba.
hodnota D a hod merané zodpovedajúcim spôsobom s chybou D, h .
Chyba hlasitosti sa bude rovnať
Ak vzorec reprezentuje výraz vhodný pre logaritmizáciu (to je produkt, zlomok, stupeň), potom je výhodnejšie najprv vypočítať relatívnu chybu. Ak to chcete urobiť (v prípade aritmetickej priemernej chyby), je potrebné urobiť nasledovné.
1. Prologizujte výraz.
2. Rozlíšte to.
3. Kombinujte všetky podmienky s rovnakým diferenciálom a vložte ho do zátvoriek.
4. Vyjadrite výraz pred rôznymi diferenciálmi modulo.
5. Vymeňte rozdielové odznaky d na ikony absolútnej chyby .
Výsledkom je vzorec pre relatívnu chybu
Potom, keď poznáte , môžete vypočítať absolútnu chybu
=
Príklad.
Podobne môžeme napísať relatívnu priemernú štvorcovú chybu
Pravidlá pre prezentáciu výsledkov merania sú nasledovné:
chyba by sa mala zaokrúhliť na jednu významnú číslicu:
správne = 0,04,
zlé - = 0.0382;
posledná významná číslica výsledku musí mať rovnaký rozsah ako chyba:
správne = 9,830,03,
nesprávne - = 9,8260,03;
ak má výsledok veľmi veľkú alebo veľmi malú hodnotu, je potrebné použiť indikatívnu formu záznamu - to isté platí pre výsledok a jeho chybu a desatinná čiarka by mala nasledovať po prvej významnej číslici výsledku:
správne - = (5.270.03) 10 -5,
nesprávne - = 0.00005270.0000003,
= 5.27 ÷ 10 -5 0.0000003,
= = 0,00005273,10 -7,
= (5273) 10 -7,
= (0,5270,003) 10-4.
Ak má výsledok rozmer, musíte ho zadať:
správne - g = (9,820,02) m / s 2,
nesprávne - g = (9,820,02).
Pravidlá plotovania
1. Grafy sú postavené na grafovom papieri.
2. Pred vykreslením je potrebné jasne definovať, ktorá premenná je argument a ktorá je funkcia. Hodnoty argumentov sú vynesené na osi x (osa x), hodnoty funkcií sú na osi y (os na).
3. Z experimentálnych údajov určiť limity zmeny argumentu a funkcie.
4. Uveďte fyzické množstvá uložené na súradnicových osiach a označte jednotky množstiev.
5. Vložte do grafu experimentálne body, označujúce ich (kríž, kruh, tučný bod).
6. Nakreslite hladkú krivku (priamku) cez experimentálne body tak, aby boli tieto body umiestnené v približne rovnakom počte na oboch stranách krivky.
Typy chýb. RMS chyba. - vzdelávacia sekcia, súradnicové systémy používané v navigácii: sférické, polárne, ortodromické. Typy chýb. Takmer vždy chyba zahrnutá ...
Typy chýb.Takmer vždy chyba zahŕňa dve časti: systematické a náhodné.
Δa = Δa sist + Δ prípad.
systematickýsa nazýva chyba, ktorá za týchto podmienok zachováva konštantnú hodnotu (alebo zmeny, ale podľa známeho zákona).
Takéto chyby sú spôsobené neustále pôsobiacimi príčinami, v dôsledku čoho sa pri meraní "pokazíme" vždy v rovnakej výške. Veľmi často sú takéto chyby spôsobené nesprávnou výrobou nástroja (prístrojové chyby) alebo konštantným vonkajším faktorom. Napríklad vlastné magnetické pole lietadla spôsobuje chybu pri meraní magnetického kurzu (odchýlka), ktorá má v každom kurze určitú hodnotu.
Systémové chyby, pretože sú rovnaké pre každé meranie, možno jednorázovo určiť pomocou presnejších nástrojov a potom vylúčiť z výsledkov merania zadaním korekcií.
Systémové chyby pri navigácii nespôsobujú veľké problémy, pretože po ich odstránení už chýbajú. Preto budeme ďalej predpokladať, že neexistujú systematické chyby (už zohľadnené).
Náhodná chybapri každom meraní má inú hodnotu a nie je vopred známe, ktorý z nich.
Ale náhodné chyby v zásade nemožno odstrániť, pretože sa pri každom meraní líšia. A vždy zostávajú neznáme.
Nie je možné určiť číselné hodnoty náhodných chýb, ale pilot musí neustále pamätať na to, že tieto chyby existujú a majú predstavu o ich možných hodnotách. Prítomnosť neistoty výsledkov merania je jedným z hlavných faktorov, ktoré komplikujú navigáciu a robia ju nielen vedou a umením.
Náhodná udalosť je udalosť, ktorá sa za daných podmienok môže alebo nemusí vyskytnúť. Stupeň možnosti takejto udalosti je číselne charakterizovaný veľkosťou pravdepodobnosti. Pravdepodobnosť P je číslo, ktoré sa môže pohybovať od 0 do 1. Ak udalosť nikdy nevyskytla za týchto podmienok, nazýva sa to nemožná udalosť a jej pravdepodobnosť je nulová. Ak sa to vždy deje za daných podmienok, potom sa nazýva autentické a je pripísané s pravdepodobnosťou rovnou jednej. Ak napríklad P = 0,3, znamená to, že v 30 prípadoch zo 100 sa udalosť vyskytne v priemere. Je to v priemere, pretože udalosť je náhodná. Ak vytvoríte podmienky potrebné na výskyt udalosti a vykonáte sériu 100 experimentov, potom sa môže vyskytnúť napríklad 23 krát alebo 32 krát ... Ak vykonáte niekoľko sérií takýchto experimentov alebo jednu sériu tisíc, desaťtisíc miliónov experimentov, potom čím väčší je počet vykonaných experimentov, tým bližší bude priemerný počet výskytov udalosti bližšie k 30% celkového počtu pokusov (ak je P = 0,3).
Ako môžu byť popísané náhodné chyby, ak nemajú žiadny zvláštny význam? Často sú charakterizované strednou štvorcovou chybou (CSP), ktorá je označená písmenom σ (sigma). Napríklad merania UPC množstva a budú označené σa.
UPC je charakteristickým znakom stupňa rozptylu nameranej hodnoty množstva okolo jeho skutočnej hodnoty. Čím väčšia je σa, tým viac sú rozptýlené (rozptýlené) hodnoty namerané v rôznych pokusoch okolo skutočnej hodnoty množstva.
Na obr. 2.19 sú geometricky reprezentované vo forme numerickej osi možných hodnôt nameranej hodnoty a zaznamenala jeho skutočnú hodnotu. Kríže na stupnici udávajú namerané hodnoty získané v dôsledku niekoľkých experimentov. V prvom prípade je rozptyl nameraných hodnôt okolo aktuálnej hodnoty väčší ako v druhom prípade, a preto "sigma", ktorá charakterizuje stupeň rozptylu, je v druhom prípade menšia.
Obr. 2.19. RMS chyba
Podľa hodnoty EUC možno posúdiť pravdepodobnosť, že nameraná hodnota bude mať jednu alebo druhú hodnotu. Ale kvôli tomu nestačí poznať EUC, musíte tiež vedieť, aké distribučné právo daná náhodná chyba podlieha. Mnoho náhodných premenných sa riadi normálnym (Gaussovským) zákonom o distribúcii. Pre tento zákon je užitočné pripomenúť si nasledujúce hodnoty.
Ak nedôjde k systematickému omylu a výsledkom merania je hodnota aizmu, potom skutočná hodnota množstva leží v rámci (obrázok 2.20):
aism ± σa s pravdepodobnosťou P = 0,68;
aism ± 2σa s pravdepodobnosťou P = 0,95;
aism je ± 3σa s pravdepodobnosťou P = 0,997.
Obr. 2.20. Niektoré pravdepodobnosti normálnej distribúcie
Napríklad pomocou kompasu sa meria smer γ = 100 ° a presnosť kompasu sa charakterizuje EUC σγ = 2º. To znamená, že skutočná miera (ktorá nám zostane neznáma) v priemere:
v 68 prípadoch zo 100 leží v rozsahu 100 ° ± 2 °, to je v rozmedzí 98 ° ... 102 °;
v 95 prípadoch zo 100 leží v rozsahu 100 ° ± 4 °, to je v rozmedzí 96 ° ... 104 °;
v 997 prípadoch z 1000 leží v rozmedzí 100 ° ± 6 °, to je v rozmedzí 94 ° ... 106 °.
Hodnota pravdepodobnosti P= 0.997 je tak blízko, že zodpovedajúca hodnota chyby v "tri sigma" sa často nazýva maximálna chyba. V skutočnosti môže chyba prekročiť. Je pravda, zriedka - v priemere v troch prípadoch z tisíc.
V technických popisoch nástrojov a zariadení je ich presnosť uvedená priamo vo forme UPC a potom je všetko jasné. Niekedy sa však uvádza napríklad: "chyba merania ložiska ± 1,5 °". To samozrejme neznamená, že takýto smerovač sa "pokazí" vždy o 1,5 °. To tiež neznamená, že sa nemôže mýliť. viacnež 1,5 °. Spravidla zadaná hodnota chyby zodpovedá pravdepodobnosti P= 0,95. To znamená, že v 95 prípadoch zo 100 sa chyba neprekročí (nahor alebo nadol) o hodnoty 1,5 °.
Z toho vyplýva, že v piatich prípadoch zo stovky môže byť chyba viac. Pre normálny zákon o rozdelení chýb zodpovedá pravdepodobnosť 0,95 dvakrátUPC. UCS meranie ložiska v tomto príklade bude teda 0,75 °.
Koniec práce -
Táto téma patrí:
Obr. Polárny súradnicový systém ... Vzdialenosť od pôvodu súradnicového systému k bodu objektu ...
Ak potrebujete ďalšie materiály k tejto téme, alebo ste nenašli to, čo ste hľadali, odporúčame použiť vyhľadávanie v našej databáze:
Ak sa vám tento materiál ukázal ako užitočný, môžete ho uložiť na svoju stránku v sociálnych sieťach:
| Tweet |
Súradnicové systémy používané v navigácii (sférické, polárne, ortodromické).
Ak sa nevyžaduje veľmi vysoká presnosť riešenia navigačných problémov, môže byť Zem považovaná za sféru. V tomto prípade sa používa normálny systém sférických súradníc, ktorého póly
Navigačné a letové prvky.
Akrobatické prvky. Navigácia a pilotovanie sú procesy riadenia letovej prevádzky. Na opis tohto pohybu sa používajú hodnoty nazývané navigácia a akrobacia.
Vietor a jeho charakteristiky. Ekvivalentný vietor.
Hmotnosti atmosférického vzduchu sú takmer vždy v pohybe, čo je spôsobené rozdielmi teploty a tlaku v rôznych oblastiach zemského povrchu. Zisťujú sa príčiny a povaha takéhoto pohybu
Rýchlosti navigačného trojuholníka. Závislosť medzi rýchlosťou a uhlom vychýlenia na uhle vetra.
Slnko sa pohybuje vzhľadom na hmotnosť vzduchu s skutočnou rýchlosťou vzduchu V, vzdušnou hmotnosťou vzhľadom na zem pri rýchlosti U a rýchlosťou pohybu slnka vzhľadom na
Zásady merania kurzu a typy kurzových zariadení.
Kurz charakterizuje smer pozdĺžnej osi lietadla v horizontálnej rovine, čiže ukazuje, kde je nasmerovaný "nos" lietadla. Je to dôležité pre navigáciu, pretože súčasne
Odchýlka, jej typy, účtovanie za letu.
Je zrejmé, že na rovnakom mieste v priestore nemôžu existovať súčasne dve magnetické polia, dva intenzívne vektory - Zem (H) a rovina (F). títo
Praktické odporúčania týkajúce sa použitia magnetických kompasov.
1. Treba mať na pamäti, že v polárnych oblastiach, kde je magnetický sklon veľký, a preto je horizontálna zložka magnetického poľa Zeme malá, sú magnetické kompasy nestabilné a môžu
Princíp merania gyroskopického kurzu. Výstavná os gyroskopu, horizontálna a azimutálna korekcia.
Gyroskop (od starovekého gréckeho po "otočenie" a "pohľad") je v podstate každé rotujúce telo. V modernej technológii je gyroskop pomerne masívny rotor s vysokou rýchlosťou.
Gyropolukompas GPK-52. Ortodromicita gyropolu kompasu.
Gyropolukompas GPK-52. Princíp činnosti gyroskopických prístrojov bude zvážený na príklade jedného z najjednoduchších zariadení tohto druhu - gyroskopický polokaspik GPC-52.
Ortodroma samozrejme gyro
Teraz, po analýze správania gyroskopu na stacionárnej rovine, zvážime, ako sa bude správať, keď sa lietadlo pohybuje pozdĺž ortodromickej línie. Všeobecný prípad - n
Referenčný poludník a ortodromický kurz. Miera konverzie.
Os gyroskopu na začiatku letu môže byť nastavená v absolútnom smere. Piloti sú zvyknutí na to, že 0 ° smeruje na sever, 90 ° na východ, atď. Preto číselné hodnoty gir
Základné informácie o kurzových systémoch. Režim magnetickej korekcie.
Každá z dvoch uvažovaných princípov merania - magnetické a gyroskopické - má svoje vlastné výhody a nevýhody. Magnetický kompas má tú výhodu, že to umožňuje
Režim magnetickej korekcie
Ako už bolo uvedené, v režime "GPC" systém výmenných kurzov pracuje podobne ako bežný gyropolucompass, preto tento režim nevyžaduje ďalšie oddelené posúdenie. Zamyslite sa nad úlohou
Koncepcia rádiových výškomerov
Rádiový výškomer (PB) je samostatné rádiové zariadenie. To znamená, že rádiové vlny sa používajú na jeho prevádzku a nie je potrebné vybavenie na zemi. decembra
Princíp činnosti, prístroj a chybový barometrický výškoměr.
Podľa princípu svojho zariadenia je barometrický výškoměr v podstate aneroidný barometer s jediným rozdielom, že jeho stupnica nie je odstupňovaná z hľadiska tlaku, ale v jednotkách
Chyby barometrického výškomeru
Barometrický výškomer má niekoľko chýb, ktoré sa líšia svojimi príčinami. Chyby spôsobené rôznymi faktormi sa spočítajú, aby vytvorili jednu bežnú chybu - rozdiel medzi
Barometrické úrovne nuly
V zásade nastavením tlaku na stupnicu barometrického výškomeru môže pilot zvoliť úroveň, z ktorej si želá počítať výšku. Z hľadiska bezpečnosti letov,
Pravidlá pre inštaláciu tlaku na stupnici barometrického výškomeru
Zvážte poradie inštalácie tlaku počas letu na SPT. Tradičná technológia schválená v našej krajine stanovuje, že pred odchodom všetkých členov posádky na ich výškomery
Indikátory rýchlosti jednej šípky
Rovnica Bernoulliho zahŕňa vzduchovú hustotu ρ v oboch častiach prúdu. Pri nízkych rýchlostiach (až 400-450 km / h) a nadmorských výškach letov (do 4000-5000 m) môže byť vzduch považovaný za nestlačiteľný
Kombinované ukazovatele rýchlosti
Pri vysokých rýchlostiach a nadmorských výškach je rozdiel medzi skutočnou rýchlosťou a rýchlosťou prístrojov už značný. Navyše stlačiteľnosť vzduchu začína mať výrazný vplyv na vysoké rýchlosti a výšky. Básnik
Chyby indikátora rýchlosti
Instrumentálne chyby ΔV a vznikajú v dôsledku nedokonalosti konštrukcie zariadenia a nepresnosti jeho nastavenia. Každý nástroj má svoje vlastné inštrumentálne hodnoty.
Pojem číslovania
Pri vykonávaní akéhokoľvek letu musia členovia letovej posádky kedykoľvek poznať aktuálnu polohu lietadla. Určenie polohy lietadla - jednej z hlavných úloh leteckej navigácie. V leteckej navigácii
Grafické zúčtovanie
Plné tesnenie. Účelom plného pruhu je určiť aktuálnu MS, a preto sa samozrejme vykonáva aj počas letu. Nemali by ste si myslieť, že v každom lete pilot alebo navigátor vykonal
Princíp automatického výpočtu súkromných ortodromických súradníc.
Číslovanie je výpočet aktuálnych súradníc, preto hlavnou časťou každého automatizovaného číselného systému je navigačná kalkulačka. Môže to byť analóg, teda základ
Diss. Kursodoplerovskoe a procursus calcul.
Dopplerovská rýchlosť a drift meter (DISS) sú palubné rádiové zariadenia, ktoré umožňujú merať rýchlosť a uhol posuvu na palube lietadla. DISS na základe použitia
Základné pravidlá leteckej navigácie. Riadiaca cesta a jej typy.
Počas celého letu musí posádka dodržiavať tieto základné pravidlá pre leteckú navigáciu. 1) kontrola udržiavania danej dráhy letu v intervaloch potrebných na zabezpečenie
Vizuálna orientácia.
Vizuálna orientácia je metóda určovania MK na základe porovnania mapy s terénom, ktorý sa preleje. Pre vizuálnu orientáciu sa používajú orientačné body. Navigačný orientačný bod
Všeobecná metóda pozícií. Navigačný parameter, povrch a pozícia.
Parameter navigácie. Miesto lietadla sa môže určiť pomocou rôznych technických nástrojov, vrátane rádionavigácie a rôznych metód. Ale ako ukázal profesor V.V.
Plocha a pozícia.
Ak má navigačný parameter v určitom bode v priestore určenú hodnotu, potom to vôbec neznamená, že v iných bodoch jeho hodnoty musia byť nevyhnutne odlišné. naisto
Typy riadkov polohy.
V navigácii sa najčastejšie používajú navigačné parametre, čo sú geometrické hodnoty, tj vzdialenosti, uhly atď. V tomto prípade každý typ navigačného parametra zodpovedá
Navigačné charakteristiky systému rádiového kompasu.
Systém rádiového kompasu zahŕňa pozemnú rozhlasovú stanicu a palubnú smerovku nazývanú automatický rádiový kompas (ARC). Rádiové stanice môžu byť použité špeciálne nainštalované
Princíp ARC a poradie jeho nastavení.
Princíp činnosti rádiového kompasu je založený na smerovom prijímaní rádiových vĺn. ARC obsahuje tieto hlavné komponenty: - otočnú smyčkovú anténu; - neurčené (skryté
Metódy letu na PHT (pasívne, kurzy, aktívne).
Spôsoby lietania do alebo z rozhlasovej stanice. Ako už bolo uvedené, CSD nie je navigačný parameter, pretože v rovnakom bode vo vesmíre môže mať akúkoľvek hodnotu
Riadenie trasy v smere pomocou ARC pri lietaní do a z RNT.
Kontrolná dráha stavu v smere. Existuje všeobecný pojem "radionavigačný bod" (RNT), ktorý sa môže používať na označenie akýchkoľvek terestriálnych rádionavigačných prostriedkov: OP
Rozsah riadiacej dráhy pomocou ARC.
Diaľková kontrola je určenie ubehnutej vzdialenosti alebo zostávajúcej vzdialenosti od MRP. Ak chcete vykonať, môžete použiť aj ARC a PRSD. Ale PRSD by samozrejme nemalo byť
Výpočet IPA a vymedzenie pojmu MS na dvoch rozhlasových staniciach.
Na vyriešenie niektorých navigačných problémov, napríklad na určenie MS, je potrebné umiestniť na mape LRPS. Na to musíte najprv určiť ložisko lietadla. Pretože na akejkoľvek použitej mape
Určenie polohy lietadla na dvoch rozhlasových staniciach
Určenie pozície lietadla je úplnou kontrolou trasy, pretože ak je známe sedadlo lietadla, je možné určiť odchýlku od LZP (riadenie trasy v smere) a ubehnutú alebo zostávajúcu vzdialenosť
Oprava cesty s východom do MRP a uhla výstupu.
Oprava cesty s uvoľnením MRP. Oprava trasy je akcia, ktorá prináša lietadlo na danú trajektóriu po odhalení odchýlky od nej. Jedna cesta isp
Korekčná cesta s uhlom výstupu
Predtým v kapitole 1 bol diskutovaný jeden zo spôsobov, ako napraviť cestu - s uvoľnením MRP. Takáto metóda v civilnom letectve je však uplatniteľná najmä na malé lineárne odchýlky,
Ukazovatele ako RMI a UGR. Let na LZP s ich použitím.
Najčastejšie tzv. Rádiomagnetické indikátory (RMI). V angličtine sa nazývajú rovnakým spôsobom - Radio Magnetic Indicator (RMI). V niektorých typoch domácich navigačných systémov
Let v zosúlaďovaní rozhlasových staníc
Ak má byť let uskutočnený na LZP, na ktorom sú inštalované dve rozhlasové stanice, hovorí o lietaní v usporiadaní rozhlasových staníc. Ak slnko letí medzi RNT (jeden vpredu a druhý za sebou), potom cieľ sa volá
Minimálna a maximálna činnosť RNS.
Minimálny rozsah činnosti. Vo vertikálnej rovine vyzerá priblíženie väčšiny pozemných rádiových navigačných pomôcok (rozhlasových staníc, rádiových majákov)
Navigačné charakteristiky systému zisťovania smeru.
Charakteristiky rádiového smerovacieho systému. Rádiový smerový systém je primárne prostriedkom riadenia letovej prevádzky (ATC). S jeho pomocou riadiaci letovej prevádzky na zemi
Systém rádiového majáku VOR a jeho žiadosť o let na LZP, definícia MS.
Zásada VOR. Signálny systém VOR s rozhlasovým majákom (veľmi vysokofrekvenčný všesmerový rozsah) zahŕňa pozemné zariadenia - rádiový maják VOR a palubné zariadenie
Určenie polohy lietadla jednou rádiovou stanicou
V súlade so všeobecnou metódou polohových línií na určenie MS sú potrebné dva navigačné parametre a dve zodpovedajúce polohové čiary. Zdá sa, že ak je rozhlasová stanica iba jedna
Princíp činnosti systémov merania vzdialenosti. Šikmý a horizontálny rozsah.
DME charakteristika. Rádiový navigačný systém diaľkového dosahu (DRNS) zahŕňa pozemné zariadenia (rádiový maják diaľkového dosahu) a palubné vybavenie (diaľkový detektor lietadiel)
Goniometrické systémy na meranie vzdialenosti. Navigačné charakteristiky RSBN.
Goniometrické rádiové navigačné systémy (UDRNS) volajú také systémy, ktoré umožňujú súčasne merať dva navigačné parametre - ložisko a rozsah. Pomocou UDRNS môžete
Navigačné charakteristiky pozemného radaru a ich použitie na sledovanie a opravu trasy.
Koncepcia radaru. Pod radarom (z "rádia" a lokality (lat.) - na určenie polohy) v širokom slova zmysle rozumieť, ako určiť miesto a charakter
Pojem zónová navigácia.
Pokyny pre navigáciu. Nie je možné pochopiť, čo je zónová navigácia a moderná navigácia vo všeobecnosti, ak nemáte predstavu o takejto koncepcii ako navigačná navigácia.
Princíp fungovania palubného radaru. Ovláda radar "Búrka".
Vzdušná radarová stanica (RLS) je samostatný rádiotechnický prostriedok, ktorý umožňuje sledovať radarový obraz lietajúceho priestoru a okolitú vzdušnú situáciu,
Metódy určovania MS pomocou radaru (goniometer, diaľkomer, goniometrický diaľkomer).
S radarom môžete zistiť, že MS je oveľa presnejšia ako metóda porovnávacieho prehľadu. Ak to chcete urobiť, musíte na obrazovke lokátora merať uhol chodu a vzdialenosť od referenčného bodu. Kurz ihriska ori
Prehľad a porovnávacia metóda orientácie na radare a definícia s jeho rýchlosťou pomoci a uhlom posunu.
Vzhľadom na skutočnosť, že sa na plátne radaru vytvára obraz lietajúceho terénu, pilot môže viesť orientáciu porovnaním radarového obrazu s letovou mapou, podobne ako
Určenie rýchlosti terénu a uhlu posuvu radarom
Určenie rýchlosti vozidla. Všetky orientačné body na obrazovke ako pohyb slnka sa pohybujú v smere proti smeru slnka, to znamená, že na obrazovke smerom nadol. Ima
Princíp zotrvačnosti
Inerciálne navigačné systémy (INS) sú založené na meraní zrýchlenia lietadla pozdĺž osi súradnicového systému. Zrýchlenia sa merajú pomocou zariadení nazývaných akcelerometre. Princíp činnosti
Parametre určené pomocou ins. Voľné formuláre.
Parametre určené INS Inerciálne systémy sú určené na určenie súradníc lietadla. Ale v procese ich určovania môžete získať hodnoty mnohých d
Inerciálne navigačné systémy vo forme voľných foriem
Počas mnohých desaťročí snahy inžinierov, ktorí rozvinuli tradičné ANN, boli zamerané na zníženie sebadôvery gyroskopov, ktoré držia gyrofotometriu v určitej polohe. nie
Výpočet priebehu, rýchlosti a času známeho vetra.
Zvážte postup na riešenie problému na príklade s nasledujúcimi prvými údajmi: V = 400; ZMPU = 232; S = 290; U = 70; S = 164; ΔM = -4.
Určenie vetra počas letu.
Uvedené: V = 680; W = 590; MK = 312; MS = + 8; ΔM = -4. Nájdite: δn, δ, U.
Výpočet skutočnej rýchlosti v širokej šípke.
Skutočná rýchlosť podľa indikácie šírky šírky KUS sa vypočíta podľa vzorca: Vi = Vpr + ΔV a + ΔVa + ΔV cf + ΔV