eroaremăsurare
Deviația rezultatului măsurătorii de valoarea adevărată (valabilă) a valorii măsurate.
Termen sinonim eroare de măsurare este termenul eroare de măsurareutilizarea care nu este recomandată ca fiind mai puțin reușită
Eroare componentă a rezultatului măsurătorii, rămânând constantă sau schimbată în mod regulat cu măsurători repetate ale aceleiași cantități fizice.
Notă - În funcție de natura măsurătorii, erorile sistematice sunt împărțite în permanent, progresiv, periodic și erori complexe ale legii.
Erori constante - erori care își păstrează valoarea pentru o lungă perioadă de timp, de exemplu, în timpul duratei de execuție a întregii serii de măsurători. Ele sunt cele mai comune.
Eroare progresivă - creșteri sau scăderi continue ale erorilor. Acestea includ, de exemplu, erorile datorate uzurii vârfurilor de măsurare în contact cu piesa atunci când este controlată cu un dispozitiv de control activ.
Erorile periodice sunt erori a căror valoare reprezintă o funcție periodică a timpului sau a mișcării unui indicator al instrumentului de măsurare.
Erori care se schimbă în conformitate cu o lege complexă apar ca urmare a acțiunii comune a mai multor erori sistematice.
Componenta erorii de măsurare din cauza erorii instrumentului de măsurare utilizat
eroare de metodă
Componenta erorii de măsurare sistematice cauzată de imperfecțiunea metodei de măsurare adoptate.
notițe
1 Din cauza simplificărilor adoptate în ecuațiile de măsurare, există adesea erori semnificative, pentru a compensa acțiunea a cărei corecții ar trebui introduse. Eroarea metodei este uneori numită eroare teoretică.
2 Uneori eroarea metodei poate apărea ca aleatorie.
Componenta erorii de măsurare sistematice, care este o consecință a influenței necunoscute a deviației într-o direcție a oricărui parametru care caracterizează condițiile de măsurare de la valoarea setată.
Notă - acest termen este utilizat în cazul unor acțiuni care nu au fost luate în considerare sau insuficient luate în considerare pentru o anumită valoare de influență (temperatura, presiunea atmosferică, umiditatea aerului, intensitatea câmpului magnetic, vibrațiile etc.); instalarea necorespunzătoare a mijloacelor de măsurare, încălcarea regulilor de aranjament reciproc etc.
eroare subiectivă
Componenta erorii de măsurare sistematice datorată caracteristicilor individuale ale operatorului.
notițe
1 Există operatori care întârzie sistematic (sau înainte) să facă citiri ale instrumentelor de măsurare.
2 Uneori este numită eroare subiectivă eroare personală sau diferența personală
PNS
Eroare componentă a rezultatului măsurătorilor din cauza erorilor în calcularea și introducerea modificărilor la influența erorilor sistematice sau a erorilor sistematice, corectarea a căror efect nu este introdus datorită micului său efect.
aleatorie
Eroare componentă a rezultatului măsurătorii, schimbarea aleatorie (prin semn și valoare) în timpul măsurătorilor repetate efectuate cu aceeași îngrijire, aceeași cantitate fizică
eroare absolută
Eroare de măsurare, exprimată în unități de măsurare
Valoare eroare fără a lua în considerare semnul său (modul de eroare)
Notă - Este necesar să se facă distincția între termeni. eroare absolută și valoarea absolută a erorii
eroare relativă
Eroare de măsurare, exprimată ca raport între eroarea de măsurare absolută și valoarea reală sau măsurată a valorii măsurate.
rezultate împrăștiate;
imprastiere
Discrepanța dintre rezultatele măsurătorilor de aceeași mărime într-o serie de măsurători egale, de regulă, datorită efectului de erori aleatorii.
notițe
1 O estimare cantitativă a dispersiei rezultatelor într-o serie de măsurători datorate efectului erorilor aleatorii este obișnuită după introducerea corecțiilor pentru efectul erorilor sistematice.
2 Estimările împrăștierii rezultatelor într-o serie de măsurători pot fi:
domeniul de aplicare,
eroare medie aritmetică (după modul);
eroarea standard sau abaterea standard (deviația standard, deviația standard experimentală);
limitele de încredere ale erorii (limita de încredere sau eroarea de încredere)
mătura
evaluare R n împrăștierea rezultatelor măsurărilor individuale ale unei cantități fizice care formează o serie (sau un eșantion de n măsurători), calculate prin formula
Rn = X max - X min
unde X max și X min - cele mai mari și cele mai mici valori ale cantității fizice din această serie de măsurători.
Notă - împrăștierea se datorează de obicei apariției unor cauze aleatorii în cadrul măsurătorilor și este probabilistică în natură.
eroare medie de măsurare pătratică;
eroare medie pătrată;
UPC
Estimarea împrăștierii rezultatelor măsurării unice într-o serie de măsurători egale ale aceleiași cantități fizice în jurul valorii medii
unde xi este rezultatul măsurării unității i;
X este media aritmetică a valorii măsurate a rezultatelor unice.
NOTĂ În practică, termenul este larg răspândit. înseamnă pătrat deviație - (SKO). Abaterea în conformitate cu formula (9.6) este înțeleasă ca abaterea rezultatelor unice într-o serie de măsurători din valoarea lor medie aritmetică. În metrologie, după cum se menționează la punctul 9.1, această abatere se numește eroare de măsurare. Dacă rezultatele măsurătorilor sunt corectate pentru efectul erorilor sistematice, atunci abaterile sunt erori aleatorii. Prin urmare, din punctul de vedere al raționalizării ansamblului de termeni, termenul generic printre care este termenul "eroare de măsurare", este rezonabil să se utilizeze termenul "eroare medie pătrată". Atunci când se prelucrează o serie de rezultate de măsurare care nu conțin erori sistematice, EUC și EQ reprezintă aceeași estimare a împrăștierii rezultatelor măsurărilor unice.
eroare medie pătrată a mediei aritmetice;
mediueroare patratică;
UPC
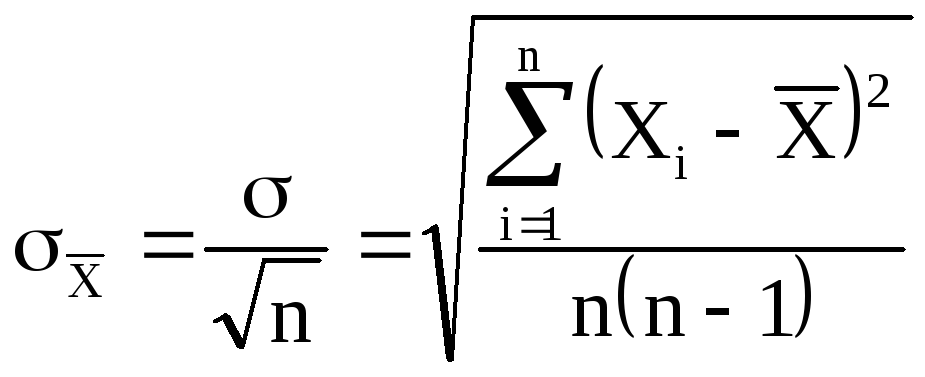
evaluareS x eroare aleatorie a mediei aritmetice a rezultatului măsurătorii aceleiași valori într-o serie de măsurători dată, calculată prin formula
, (9.7)
unde S reprezintă eroarea pătrată medie a rezultatelor măsurărilor unice obținute dintr-o serie de măsurători egale; n este numărul măsurătorilor individuale din serie
limitele de încredere ale erorilor;
limitele de încredere
Valorile cele mai mari și mai mici ale erorii de măsurare, limitând intervalul în care valoarea dorită (adevărată) a erorii rezultate din măsurare este cu o anumită probabilitate.
2 Cu limite simetrice, termenul poate fi folosit în limbajul singular - limita de încredere.
3 Uneori în loc de termen limita de încredere utilizați termenul eroare de încredere saueroare la un anumit nivel de încredere
9.17 corecție
Valoarea de valoare introdusă în rezultatul măsurării necorectate pentru a elimina componentele erorilor sistematice.
Notă - Semnul amendamentului este opus semnei de eroare. Se solicită amendamentul adăugat la valoarea nominală a măsurii modificare a valorii măsurate; se numește amendamentul introdus în citirea contoruluimodificare a citirii instrumentului
9. 18 factor de corecție
Coeficientul numeric prin care rezultatul măsurării necorectate se înmulțește pentru a elimina influența erorii sistematice.
Notă - Factorul de corecție este utilizat în cazurile în care eroarea sistematică este proporțională cu valoarea lui
9. 19 precizia rezultatului măsurătorii;
precizia măsurării
Una dintre caracteristicile calității măsurării, care reflectă apropierea de zero a erorii rezultatului măsurătorii.
Notă - Luați în considerare faptul că cu cât este mai mică eroarea de măsurare, cu atât este mai mare precizia
9 . 20 incertitudine măsurare;
incertitudine
Parametrul asociat cu rezultatul măsurătorii și caracterizând împrăștierea valorilor care pot fi atribuite valorii măsurate.
notițe
1 Definiție luată din VIM-93.
2 Definiția din note, din care rezultă că:
a) un parametru poate fi o abatere standard (sau un multiplu al acestuia) sau jumătate din intervalul care are nivelul de încredere specificat;
b) incertitudinea constă (în cea mai mare parte) din multe componente. Unele dintre aceste componente pot fi estimate prin deviații standard experimentale într-o serie de măsurători distribuite statistic. Alte componente, care pot fi estimate și prin abateri standard, se bazează pe date experimentale sau alte informații.
9. 21 eroare de calibrare
Acuratețea metodei aplicate de transfer a mărimii unității în timpul calibrării
9. 22 eroare de măsurare a gradării;
eroare de calibrare
Eroarea valorii reale a valorii atribuite uneia sau altei mărci a scalei instrumentului de măsurare ca urmare a graduării
9. 23 eroare redare unități de cantitate fizică;
eroare de reproducere
Eroarea rezultatelor măsurătorilor efectuate la reproducerea unei unități de cantitate fizică.
Notă - Eroarea reproducerii unei unități cu ajutorul standardelor de stat este indicată de regulă sub forma componentelor sale: eroare sistematică ne-exclusă; eroare aleatorie; instabilitate pentru an
9. 24 eroare a transferului mărimii unei unități de cantitate fizică;
eroare de dimensiune unitate
Eroarea rezultatelor măsurătorilor la transferarea mărimii unei unități.
Notă - Eroarea în transferul mărimii unei unități include atât erorile sistematice, cât și aleatorii ale metodei și ale instrumentelor de măsurare
9. 25 eroare de măsurare statică;
eroare statică
Eroare de măsurare inerentă condițiilor statice de măsurare
9. 26 eroare de măsurare dinamică;
eroare dinamică
Eroare de măsurare inerentă condițiilor dinamice de măsurare
9. 27 alunecare
Eroarea rezultatului unei măsurători individuale care este inclusă într-o serie de măsurători, care pentru aceste condiții diferă brusc de celelalte rezultate ale acestei serii.
Notă - Uneori, termenul "dor" este folosit în loc de eroare grosieră de măsurare
9. 28 eroare maximă de măsurare într-o serie de măsurători;
marja de eroare
Eroare maximă de măsurare (plus, minus) permisă pentru această sarcină de măsurare.
9. 29 eroare a rezultatului unei singure măsurători;
eroare de măsurare
Eroarea unei măsurători (care nu este inclusă într-o serie de măsurători), estimată pe baza erorilor cunoscute ale mijloacelor și metodei de măsurare în aceste condiții (măsurători).
Exemplu - o măsurătoare cu un singur micrometru de orice dimensiune a piesei are o valoare de 12,55 mm. În același timp, înainte de măsurare, se știe că eroarea micrometru în acest interval este de ± 0,01 mm, iar eroarea metodei (evaluarea directă) în acest caz este presupusă a fi zero. Prin urmare, eroarea rezultatului va fi egală cu ± 0,01 mm în condițiile de măsurare date
9. 30 eroare medie pătrată medie a rezultatului măsurătorii;
eroare totală a rezultatului;
eroare totală
Eroarea rezultatului măsurătorii (care constă în suma dintre erorile sistematice aleatorii și ale celor care nu au fost excluse, luate ca aleatoriu), calculate prin formula
, (9.8)
unde
Eroarea pătrată medie a sumei erorilor sistematice ne-excluse cu o distribuție uniformă (luată ca aleatorie).
Notă - limitele de încredere ale erorii totale (Δx) Σ poate fi calculată prin formula
( Δx) Σ = ± t Σ S Σ (9.9)
în cazul în care; Θ - limita sumei erorilor sistematice ne-excluse ale rezultatului măsurării, calculată prin formulele (9.2) sau (9.3); t * Sx - limita de încredere a erorii rezultatului măsurătorii conform 9.16
Timp de încărcare
de la 6,5 la 8,5 V
2.4 Determinarea poziției punctelor pe suprafața pământului folosind sisteme geodezice prin satelit
Conceptul și programul de transfer al producției topografice și geodezice la metodele autonome de definire a coordonatelor satelitare elaborate de Geodezia Federală de Cartografie a Rusiei sunt prezentate în lucrările lui E. A. Zhalkovsky, G. V. Demyanova, V. I. Zubinsky, P. L. Makarenko, G. A. Pyankova, "Cu privire la conceptul și programul de transfer al producției topografice și geodezice la metodele autonome de determinare a coordonatelor prin satelit" (Geodezie și Cartografie, 1998, nr. 5). Metodele geodezice tradiționale se bazează pe dezvoltarea consistentă a rețelelor geodezice prin măsurători unghiulare și liniare, care necesită asigurarea vizibilității directe între punctele adiacente ale semnelor geodezice, a căror construcție necesită aproximativ 80% din fondurile cheltuite pentru crearea rețelelor de referință existente.
Comparat cu metodele tradiționale prin satelit GLONASS / GPS au următoarele avantaje:
transfer cu eficiență ridicată și precizie a coordonatelor la aproape orice distanță;
punctele geodezice pot fi amplasate în locuri favorabile siguranței lor, deoarece nu este necesară asigurarea vizibilității reciproce între puncte și, prin urmare, construirea de semne geodezice costisitoare;
simplitate și nivel înalt de automatizare a muncii;
scăderea cerințelor de densitate pentru baza geodezică originală.
Implementarea tehnologiei prin satelit implică construirea următoarelor rețele geodezice:
rețeaua fundamentală astronomico-geodezică (FAGS) este cel mai înalt nivel de sprijin al coordonatelor; trebuie să asigure reproducerea promptă a sistemului de coordonate geocentrice generale, stabilitatea sistemului de coordonate în timp, metrologic, furnizarea de instrumente de măsurare a spațiului de înaltă precizie;
o rețea geodezică de înaltă precizie (HCV), care asigură diseminarea sistemului de coordonate geocentrice generale și determinarea parametrilor exacți ai orientării relative a sistemelor geodezice generale și a coordonatelor de referință în întreaga țară;
rețele geodezice satelit de clasa I (SGS-1).
Aceste trei clase de rețele sunt strict interconectate: FAGS este un suport pentru HCG, iar HCV este pentru GHS-1.
La construirea FAGS, VGS și GHS-1, GGS existent este legat de cea mai înaltă clasă de rețele satelit, adică GGS existent va fi o rețea de îngroșare.
Punctele FAGS se află la o distanță de 800-1000 km, numărul lor - 50 + 70,10-15 puncte ar trebui să funcționeze permanent, iar restul ar trebui redefinit în grupuri la intervale, în funcție de activitatea geodinamică a regiunii.
Poziția spațială a punctelor FAGS este determinată în sistemul general de coordonate de pământ cu eroarea poziției punctelor față de centrul de masă, nu mai mult de (2-3) 10-8 R, unde R este raza Pământului, eroarea poziției relative a punctelor FAGS nu depășește 2 cm în plan și 3 cm înălțime . Pentru a asigura această precizie, este necesar să se utilizeze întreaga gamă de măsurări ale spațiului existent (laser, interferometru radio și altele).
HCV este un sistem de puncte cu distanța D = 150-300 km între ele, determinate de metodele relative ale geodeziei spațiului cu o eroare standard mai mică de 3 mm + 5 10-8 D pentru coordonatele planificate și 5 mm + 7 10-8 D pentru geodezice înălțimi.
GHS-1 constă dintr-un sistem de puncte ușor accesibile, cu o densitate suficientă pentru ca consumatorii să poată utiliza tot felul de definiții prin satelit. GHS-1 este determinat de metodele relative ale geodeziei spațiului cu erori standard: 3 mm + 10-7 D în plan și 5 mm + + 2 10-8 D în funcție de înălțimea geodezică pentru regiuni geodinamic active și 5 mm + 2 10-7. D în plan și 7mm + 3 10-7 D în înălțime pentru regiunile rămase. Distanța medie dintre punctele GHS-1 este de 25-35 km. În zonele dezvoltate economic, punctele SGS-1, în funcție de cerințele consumatorilor, pot avea o densitate mai mare.
Punctele FAGS care funcționează permanent sunt create în principal pe baza punctelor de operare ale observărilor prin satelit, observatoare astronomice, puncte de rotație a Pământului, complexe radio interferometrice cu baze Kvazar ultra-lungi, programul Delta și altele. sisteme de supraveghere prin satelit GLONASSși GPS (inclusiv programele internaționale) și observațiile altor sateliți specializați și obiecte spațiale conform programelor inter-agenție pentru construirea FAGS.
Trebuie remarcat faptul că tehnologiile prin satelit nu pot fi utilizate întotdeauna în rezolvarea sarcinilor geodezice tradiționale, de exemplu, precizia relativă a definițiilor pentru distanțe scurte este insuficientă, utilizarea metodelor GPS în mod precis inginerie, procesul de puncte de referință obligatorii, care este ușor de rezolvat în tehnologia tradițională, devine destul de complicat și costisitor, în special în zone închise, în tehnologie prin satelit, deoarece volumul definițiilor prin satelit în acest caz se dublează.
3. Eroarea măsurărilor geodezice (teoria și rezolvarea problemelor)
3.1 Măsurarea geodezică, rezultatul măsurării, metodele și condițiile de măsurare. Măsurători egale și neliniare
Măsurarea se referă la procesul de comparare a unei anumite cantități fizice cu o altă valoare cu același nume, luată ca unitate de măsură.
Unitatea de măsură este valoarea unei cantități fizice utilizată pentru cuantificarea unei valori de același tip.
Rezultatul măsurării este un număr egal cu raportul dintre valoarea măsurată a unității de măsură.
Există următoarele tipuri de măsurători geodezice:
Linear, ca rezultat, care primesc distanțe iraționale oblice între punctele date. În acest scop se utilizează benzi, măsuri de bandă, fire, lumină optică și aparate de măsură a distanței radio.
Unghi, definind magnitudinea unghiurilor orizontale. Pentru a efectua astfel de măsurători utilizând un teodolit, busolă, eclimetri.
Înălțimea, ca rezultat, care primesc diferența de înălțime a punctelor individuale. În acest scop, utilizați niveluri, teodolit-taheometre, barometre.
Există două metode de măsurare geodezică: directe și mediocre (indirecte).
Direct - măsurători în care valorile determinate sunt obținute ca rezultat al comparației directe cu unitatea de măsură.
Indirect - măsurători în care valorile determinate sunt obținute ca funcții ale altor valori măsurate direct.
Procesul de măsurare include:
Obiect - ale cărui proprietăți, de exemplu, caracterizează rezultatul măsurătorii.
Mijloace tehnice - pentru a obține rezultatul în unitățile specificate.
Metoda de măsurare - datorită teoriei acțiunilor practice și tehnicilor mijloacelor tehnice.
Măsurător - dispozitiv de înregistrare
Mediul extern în care se află procesul de măsurare.
Măsurătorile fac distincția între egală și non-egală. Egal - acestea sunt rezultatele măsurătorilor de cantități omogene, efectuate cu ajutorul instrumentelor din aceeași clasă, prin aceeași metodă, de către un interpret în aceleași condiții. Dacă cel puțin unul dintre elementele care alcătuiesc populația se modifică, rezultatul măsurătorii este inegal.
3.2 Clasificarea erorilor de măsurători geodezice. Eroare RMS. Formele lui Gauss și Bessel pentru calculul lui
Măsurătorile geodezice efectuate chiar și în condiții foarte bune sunt însoțite de erori, adică abaterea rezultatului măsurării L de valoarea reală X a cantității numerotate:
Adevărata este o valoare a unei cantități măsurabile care ar reflecta în mod ideal proprietățile cantitative ale unui obiect. Condiția inaccesibilă - adevărata valoare - este un concept ipotetic. Aceasta este o valoare care poate fi abordată aproape infinit, nu este posibilă.
Precizia măsurării - gradul de aproximare a rezultatului său la valoarea reală. Cu cât eroarea este mai mică, cu atât este mai mare precizia.
Eroare absolută exprimată prin diferența dintre valoarea obținută ca rezultat al măsurării și măsurarea reală a mărimii. De exemplu, valoarea adevărată de l = 100 m, totuși, atunci când se măsoară aceeași linie, rezultatul este de 100,05 m, atunci eroarea absolută:
E = Xeditat – X
E = 100,05 - 100 = 0,05 (m)
Pentru a obține valoarea este suficient să faceți o măsurătoare. Se numește necesar, dar mai des nu se limitează la o singură dimensiune, ci se repetă de cel puțin două ori. Măsurătorile care depășesc ceea ce este necesar se numesc redundante (suplimentare), ele reprezintă un mijloc foarte important de monitorizare a rezultatelor măsurătorilor.
Eroarea absolută nu oferă o idee despre acuratețea rezultatului. De exemplu, o eroare de 0,06 m poate fi obținută prin măsurarea l = 100 m sau l = 1000 m. Prin urmare, se calculează eroarea relativă:
C = Ecf. / X
C = 0,06 / 100 = 1/1667, adică la 1667 m măsurat l, a fost făcută o eroare de 1 metru.
Eroare relativă - raportul dintre eroarea absolută și valoarea reală sau măsurată. Fracțiune expresie. Conform instrucțiunilor, linia de teren nu trebuie măsurată mai mult de 1/1000.
Erorile care rezultă din factorii individuali sunt numiți elementari. Eroarea generalizată este suma elementelor elementare.
Există:
dur (Q),
sistematic (o)
aleator (Δ).
dur Erorile de măsurare apar ca urmare a greșelilor grosolane, a greselilor contractantului, a neglijenței sale, a defectelor neobservate ale mijloacelor tehnice. Dificultățile greșite sunt complet inacceptabile și ar trebui să fie complet excluse din rezultatele măsurătorilor prin măsurători repetate și suplimentare.
sistematic erorile de măsurare - componenta constantă asociată defectelor: viziune, funcționare defectuoasă a mijloacelor tehnice, temperatură. Erorile sistematice pot fi atât unilaterale, cât și variabile (erori periodice). Ori de câte ori este posibil, ele se caută să fie luate în considerare sau excluse din rezultatele măsurătorilor atunci când se organizează și se desfășoară activități.
întâmplător erorile de măsurare inevitabil însoțesc toate măsurătorile. Erorile aleatorii nu pot fi excluse, însă influența lor asupra rezultatelor dorite poate fi redusă prin efectuarea unor măsurători suplimentare. Acestea sunt cele mai insidioase erori asociate cu toate măsurătorile. Poate fi diferit atât în dimensiune, cât și în semn.
Dacă erorile brute și sistematice pot fi studiate și excluse din rezultatul măsurătorilor, se pot lua în considerare erorile aleatorii pe baza unei măsurători profunde. Studiu bazat pe teoria probabilităților.
În practică, dificultatea constă în faptul că măsurătorile sunt efectuate de un număr limitat de ori și, prin urmare, pentru a estima corectitudinea măsurătorilor, o estimare aproximativă a deviației standard, care este numită rms eroare.
Gauss a fost propusă o formulă pentru eroarea medie pătrată:
Δ2cp = (Δ21 + Δ22 + ... + Δ2n) / n,
Δ2 = m2 = (Δ21 + Δ22 + ... + Δ2n) / n,
∆cf. = m = √(∑∆ 2 eu / n)
Formula se aplică atunci când erorile sunt calculate din valorile reale.
Formula Bessel:
m = √(∑ V2 eu / (n-1))
Eroarea medie pătrată a mediei aritmetice este n n ori mai mică decât eroarea medie pătrată a unei măsurători individuale.
M =m/ Cn
Atunci când se estimează, eroarea standard cu o greutate egală cu una este folosită ca unitate de măsură a preciziei. Se numește eroarea pătrată medie a unei unități de greutate.
µ 2 = PBm2 - μ = mP, m = μ / P, adică eroarea medie pătrată a oricărui rezultat al măsurării este egală cu eroarea de măsurare cu o greutate de 1 μ și împărțită la rădăcina pătrată a greutății acestui rezultat (P).
Pentru un număr suficient de mare de măsurători, putem scrie Σμ2P = ΣΔ2P (din moment Δ = m):
µ = √(∑(∆ 2 BP)/ n) , Ie eroarea medie de măsurare pătratică cu o greutate egală cu 1 este egală cu rădăcina pătrată a fracțiunii în numărătorul căruia este suma produselor din pătratele de eroare absolută ale măsurătorilor dimensionale inegale pe greutățile lor, iar în numitor numărul de măsurători inegal-dimensionale.
Eroarea pătrată medie a mediei aritmetice totale prin formula:
M0 = µ / √∑ P
Înlocuind μ pentru valoarea sa, obținem:
M0 = √ (ΣΔ2ЧP / n) / (√ΣP) = √ [(ΣΔ2ЧP) / nČ (ΣP)]
M0 = √[ (∆ 1 2 P1 + ∆ 2 2 P2 +… + ∆ n2 Pn) / nH (P1 + P2 + … + Pn) ] – formulăgauss, eroarea medie pătrată a mediei aritmetice totale este egală cu rădăcina pătrată a fracțiunii, a cărei numărător este suma produselor din pătratele erorilor măsurătorilor dimensionale non-dimensionale pentru greutățile lor, iar numitorul este produsul numărului de măsurători pentru suma greutății lor.
µ = √ [∑(V2 BP) / (n-1)] Este formula Bessel pentru a calcula eroarea medie aritmetică cu o măsurare a greutății egală cu 1 pentru un număr de măsurători non-egale, utilizând erorile lor probabile. Este valabil pentru un număr mare de măsurători, iar pentru o limită (adesea practică) aceasta conține erori: mμ = μ / este fiabilitatea estimării μ.
Testați problema 1
Pentru a studia teodolitul, el a măsurat în mod repetat același unghi. Rezultatele au fost următoarele: 39,17,4 "; 39,16,8"; 39˚16,6 "; 39˚16,2"; 39,15,5 "; 39,15,8"; 39˚16,3 "; 39˚16,2". Același unghi a fost măsurat cu un dispozitiv goniometric de înaltă precizie, care a dat un rezultat de 39 4216 "42". Luând această valoare pentru corectitudine, calculați eroarea standard a pătratului, determinați fiabilitatea UPC, găsiți eroarea marginală.
| Numărul de măsurători | Rezultatele măsurării, l |
erori |
∆2 |
| 1 | 39˚17.4 " | +0.7" | 0.49 |
| 2 | 16.8 | +0.1 | 0.01 |
| 3 | 16.6 | -0.1 | 0.01 |
| 4 | 16.2 | -0.5 | 0.25 |
| 5 | 15.5 | -1.2 | 1.44 |
| 6 | 15.8 | -0.9 | 0.81 |
| 7 | 16.3 | -0.4 | 0.16 |
| 8 | 16.2 | -0.5 | 0.25 |
| sumă | 3.42 |
39˚16 "42" = 39˚16,7 "
Eroare RMS: m = √ ([Δ2 ] / n),
m = √ (3,42 / 8) = 0,65 ".
Evaluarea fiabilității UPC: mm = m / √2n,
mm = 0,65 / √16 = 0,1625 ≈ 0,16 ".
Limita de eroare: ∆ etc. = 3Hm,
Δpr = 3 ^ 0,65 "= 1,96"
Testarea 2
Având în vedere un set de reziduuri de triunghiulare volum de triangulare de 50 de unități. Presupunând că discrepanțele sunt erori reale, calculați eroarea medie pătrată și obțineți fiabilitatea UPC, calculați eroarea marginală. Pe acest set, verificați proprietatea de eroare aleatorie:
Lim [Δ] / n = 0, pentru care calculam W = [W] / n.
| N | W | N | W | N | W | N | W | N | W |
| 1 | +1,02 | 11 | -1,72 | 21 | -0,90 | 31 | +2,80 | 41 | -0,44 |
| 2 | +0,41 | 12 | +1,29 | 22 | +1,22 | 32 | -0,81 | 42 | -0,28 |
| 3 | +0,02 | 13 | -1,81 | 23 | -1,84 | 33 | +1,04 | 43 | -0,75 |
| 4 | -1,88 | 14 | -0,08 | 24 | -0,44 | 34 | +0,42 | 44 | -0,80 |
| 5 | -1,44 | 15 | -0,50 | 25 | +0,18 | 35 | +0,68 | 45 | -0,95 |
| 6 | -0,25 | 16 | -1,89 | 26 | -0,08 | 36 | +0,55 | 46 | -0,58 |
| 7 | +0,12 | 17 | +0,72 | 27 | -1,11 | 37 | +0,22 | 47 | +1,60 |
| 8 | +0,22 | 18 | +0,24 | 28 | +2,51 | 38 | +1,67 | 48 | +1,85 |
| 9 | -1,05 | 19 | -0,13 | 29 | -1,16 | 39 | +0,11 | 49 | +2,22 |
| 10 | +0,56 | 20 | +0,59 | 30 | +1,65 | 40 | +2,08 | 50 | -2,59 |
W = [W] / nW = + 2,51 / 50 = 0,05
Eroarea standard în acest caz, este recomandabil să se calculeze prin formula: m = √ (- [W]2 / n) h (n-1),
m = √ (76,5703 - (2,512) / 50) h 49 = 1,249
Evaluarea fiabilității UPC prin formula: mm = m / √2 (n-1),
mm = 1,249 / √ (2Ч49) = 0,13.
Marja de eroare de formula: ∆ etc. = 3Hm,
Δpr = 3Y1,249 = 3,747.
Testarea 5
Determinați distanța UPC calculată conform formulei
S = √(x2 - x1) 2 + (y2 - y1) 2
dacă x2 = 6,068,740 m; y2 = 431,295 m;
x1 = 6.068.500 m; y2 = 431,248 m;
mx = my = 0,1 m.
S = √(6 068 740 - 6 068 500)2 + (431 295 - 431 248)2 =235,36
mm = 0,1 / √4 = 0,05
Ținta 6
Acelasi unghi a fost masurat de 5 ori cu rezultatele: 60˚41 "; 60˚40"; 60 ° 40 "; 60 ° 42"; 60˚41 ". Efectuați procesarea matematică a acestei serii de rezultate de măsurare.
| Nn / n | l, ˚ | ε, " | v, " | v2, " |
| 1 | 60˚41 " | 1 | -0,2 | 0,04 |
| 2 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 3 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 4 | 60˚42 " | 2 | -1,2 | 1,44 |
| 5 | 60˚41 " | 1 | -0,2 | 0,04 |
| sumă | 4 | 0 | 2,8 |
10 este valoarea minimă a cantității măsurate, l0 = 60˚40 "; ε este restul obținut ca ε = l1 - l0; L este cea mai bună valoare a cantității măsurate,
L = [l] / n; m = √ ([v2] / (n - 1), unde v este abaterea de la media aritmetică M este estimarea corectitudinii valorii medii aritmetice M = m / √n.
L = 60˚40 "+ 4/5 = 60˚40,8"
m = √2,8 / 4 = 0,7 "
M = 0,7 "/ √5 = 0,313"
Activitatea de verificare 7
Efectuați o prelucrare matematică a rezultatelor măsurării de către planimetrul zonei cu același contur: 26.31; 26.28; 26,32; 26.26; 26,31 ha.
| Nn / n | eu, ha | ε, ha | v, ha | v2, ha |
| 1 | 26,31 | 0,05 | -0,014 | 0,000196 |
| 2 | 26,28 | 0,02 | +0,016 | 0,000256 |
| 3 | 26,32 | 0,06 | -0,024 | 0,000576 |
| 4 | 26,26 | 0 | 0,036 | 0,001296 |
| 5 | 26,31 | 0,05 | -0,014 | 0,000576 |
| sumă | 0,18 | 0 | 0,0029 |
L = 26,26 + 0,18 / 5 = 26,296 ha
m = √0.0029 / 4 = 0.0269 ha
M = 0,0269 / √5 = 0,01204 ha
Verificarea provocării 8
În studiul diviziunilor centimetrice ale barei de nivelare cu ajutorul liniei de la Geneva, temperatura a fost determinată la momentul preluării raportului. Pentru segmente de cinci centimetri s-au obținut următoarele valori: 20,3˚; 19,9˚; 20,1˚; 20,2˚; 20,3˚. Pentru a efectua procesarea matematică a rezultatelor măsurătorilor.
| Nn / n | l, ˚ | ε, ˚ | v, ˚ | v2, ˚ |
| 1 | 20,3 | 0,4 | -0,14 | 0,0196 |
| 2 | 19,9 | 0 | -0,26 | 0,0676 |
| 3 | 20,1 | 0,2 | -0,06 | 0,0036 |
| 4 | 20,2 | 0,3 | 0,04 | 0,0024 |
| 5 | 20,3 | 0,4 | 0,14 | 0,0196 |
| sumă | 1,3 | 0 | 0,1128 |
L = 19,9 ± 1,3 / 5 = 20,16˚
m = √0.1128 / 4 = 0.168˚
M = 0,168 / √5 = 0,075˚
3.3 Greutăți de măsurare
Măsurarea greutății - acesta este un număr abstract, invers proporțional cu pătratul rezultatului măsurătorilor UPC.
Formula de greutate:
P = K / m2 ,
unde P este greutatea rezultatului măsurătorii,
K este un număr constant arbitrar pentru o serie de măsurători date,
m - rezultat de măsurare UPC.
Din formula se poate observa că cu cât măsurarea UPC este mai mică, cu atât mai exactă este și greutatea ei este mai mare.
Raportul dintre greutatea a două măsurători este invers proporțional cu pătratele UPC ale acestor măsurători, și anume:
P1 / P2 = m22 / m12
Dacă există un număr de măsurări l1, l2, ..., ln, atunci este evident că greutatea unei măsurători va fi mai mică decât greutatea medie aritmetică a acestor valori, și anume:
unde m este eroarea unei singure dimensiuni,
M este eroarea valorii medii aritmetice.
Apoi raportul greutăților este invers proporțional cu raportul dintre pătratele UPC:
PM / Pm = m2 / M2; M = m / √n;
PM / Pm = m2 / (m / √n) 2 = m2 / (m2 / n) = m2Hn / m2 = n.
Astfel, greutatea valorii medii aritmetice este mai mare decât o singură valoare n de ori. În consecință, greutatea centrului aritmetic este egală cu numărul de dimensiuni din care este compus.
Media aritmetică totală a măsurătorilor non-egale este egală cu fracțiunea, a cărei numerotator este suma produselor valorilor medii aritmetice ale rezultatelor măsurării prin greutățile lor, iar numitorul este suma tuturor greutăților măsurătorilor. În consecință, greutatea centrului aritmetic total este egală cu suma ponderilor măsurătorilor de curent inegal:
A0 = (a1P1 + a2P2 + ... + anPn) / (P1 + P2 + ... + Pn),
unde A0 este mijlocul aritmetic general,
ai este rezultatul unei singure măsurători,
Pi este greutatea unei singure măsurători.
CSP-ul oricărui rezultat al măsurării este egal cu eroarea de măsurare cu o greutate de 1 împărțită la rădăcina pătrată a greutății acestui rezultat, și anume:
unde m este UPC al oricărui rezultat de măsurare;
M este eroarea de măsurare cu o greutate de 1;
P este greutatea acestui rezultat de măsurare.
Măsurătorile UPC cu o greutate de 1 sunt egale cu rădăcina pătrată a fracției, a cărei numărător este suma produselor pătratelor erorilor absolute ale măsurătorilor dimensionale inegale pe greutățile lor, iar în numitor numărul de măsurători inegal-dimensionale.
M = √ (ΣΔ2P / n),
unde Δ este eroarea absolută a măsurării neliniar;
P este greutatea sa;
n este numărul de măsurători.
Activitatea de verificare 9
Rezultatele măsurătorilor unghiului corespund m1 = 0,5; m2 = 0,7; m3 = 1,0. Calculați greutatea rezultatelor măsurătorilor.
P = K / m2 ;
P1 = 1 / (0,5) 2 = 4;
P1 = 1 / (0,7) 2 = 2,04;
P1 = 1 / (1,0) 2 = 1.
Răspuns: 4; 2,04; 1.
Activitatea de verificare 11
Găsiți greutatea reziduului în suma unghiurilor triunghiului, dacă toate unghiurile sunt măsurate în mod egal.
m = √ / (n-1), n = 3
m = √ [V21 + V22 + V23] / (3-1) = √ [V21 + V22 + V23] / 2
P = K / √ [V21 + V22 + V23] / 2 = 2 K / √ [V21 + V22 + V23] = 2 / Σ V2i
3.4 Funcții bazate pe rezultatele măsurătorilor și evaluarea preciziei lor
În practica lucrărilor geodezice, valorile dorite sunt adesea obținute ca urmare a calculelor, în funcție de valorile măsurate. Valorile rezultate (rezultate) vor conține erori care depind de tipul de funcție și de eroarea argumentelor pentru care sunt calculate.
Cu măsurători repetate de aceeași valoare, obținem o serie de relații similare:
Squared ambele părți ale tuturor egalității și împărți suma cu n:
(ΔU12 + ΔU22 + ... + ΔUn2) / n = k2Î (Δl12 + Δl22 + ... + Δln2) / n;
ΣΔU2 / n = k2 (ΣΔl2 / n);
m = √ (ΣΔU2 / n);
unde măsurarea distanței ml - UPC.
Funcția UPC a produsului unei valori constante printr-un argument este egală cu produsul unei valori constante prin argumentul UPC.
Funcția formei U = l1 + l2
Determinați UPC, unde l1 și l2 sunt termeni independenți cu erori aleatorii Δl1 și Δl2. Apoi suma U va conține eroarea:
ΔU = Δl1 + Δl2.
Dacă fiecare valoare a addendului este măsurată de n ori, atunci ne putem imagina:
ΔU1 = Δl1 "+ Δl2" - prima dimensiune,
ΔU2 = Δl1 "+ Δl2" - a doua măsurătoare,
…………………
ΔUn = Δl1 (n) + Δl2 (n) este dimensiunea n.
Dupa ce stergem ambele parti ale fiecarei egalitati, le adaugam dupa termen si le impartim cu n:
ΣΔU2 / n = (ΣΔ12) / n + 2 (ΣΔ1ΔΔ2) / n + (ΣΔ22) / n.
Deoarece în produsul dublu Δl1 și Δl2 au semne diferite, ele sunt compensate și împărțite printr-un număr infinit de mare n, putem neglija produsul dublu.
mU2 = ml12 + ml22;
mU = √ (ml12 + ml22).
CSP a sumei celor două valori măsurate este egală cu rădăcina pătrată a sumei pătratelor termenului CSP.
Dacă termenii au același EUC, atunci:
mU = √ (m2 + m2) = √2m2 = m√2.
În cazul general:
unde n este numărul de argumente l.
Funcția formei U = l1 - l2
mU = √ (ml12 + ml22).
UPC a diferenței dintre două măsurători ale valorilor este egală cu rădăcina pătrată a sumei pătratelor UPC redusă și scăzută.
Funcția formei U = l1 - 12 + 13
mU = √ (ml12 + ml22 + ml32 ...)
UPC a sumei valorilor n măsurate este egală cu rădăcina pătrată a sumei pătratelor UPC a tuturor termenilor.
Funcția liniară a formei U = k1l1 + k2l2 + ... + knln
mU = √ [(k1ml1) 2 + (k2ml2) 2 + ... + (knmln) 2],
și anume UCS a sumei algebrice a produselor cu o valoare constantă pe un argument este egală cu rădăcina pătrată a sumei pătratelor de produse cu o valoare constantă pe UPC a argumentului corespunzător.
Funcția formei generale U = ƒ (11, 12, ..., ln)
Acesta este cel mai general caz de dependență matematică, inclusiv toate funcțiile de mai sus, care sunt un caz special. Aceasta înseamnă că argumentele l1, l2, ..., ln pot fi date de orice ecuație. Pentru a determina CSP a unei astfel de funcții complexe, este necesar să faceți următoarele:
1. Gasiti diferenta completa a functiei:
dU = (dƒ / dl1) ddl1 + (dƒ / dl2) ddl2 + ... + (dƒ / dln) ddln,
unde (dƒ / dl1), (dƒ / dl2), ..., (dƒ / dln) sunt derivate parțiale ale funcției în raport cu fiecare dintre argumente.
2. Înlocuiți diferențialele cu pătratele UPC corespunzătoare, care intră în coeficienții pătrat pentru aceste diferențiale:
mU2 = (dƒ / dl1) 2mlml12 + (dƒ / dl2) 2mlml22 + ... + (dƒ / dln) 2Mmln2.
3. Calculați valorile derivatelor parțiale în raport cu valorile argumentelor:
(dƒ / dl1), (dƒ / dl2), ..., (dƒ / dln).
Și apoi mU = √ [(dƒ / dl1) 2 × ml12 + (dƒ / dl2) 2 × ml22 + ... + (dƒ / dln) 2 × mln2].
CSP-ul unei funcții de formă generală este egal cu rădăcina pătrată a sumei de pătrate de produse derivate parțiale pentru fiecare argument pe CSP a argumentului corespunzător.
3.5 Estimarea preciziei pe baza diferențelor de măsurări duble și a discrepanțelor în intervalele și variațiile.
În practica măsurării, de multe ori aceeași valoare se măsoară de două ori. De exemplu, laturile traversei în direcția înainte și înapoi, unghiurile celor două semi-receptoare, înălțimea - pe partea neagră și roșie a reperelor. Cu cât măsurătorile sunt mai precise, cu atât este mai bună convergența rezultatelor în fiecare pereche.
mlsr. = Ѕ √ Σd2 / n
unde d este diferența în fiecare pereche; n este numărul de diferențe.
Formula Bessel:
mlsr = Ѕ √ Σd2 / n-1
Dacă măsurătorile trebuie să satisfacă o anumită condiție geometrică, de exemplu, suma unghiurilor interne ale unui triunghi trebuie să fie 180, atunci precizia măsurătorilor poate fi determinată din reziduurile rezultate din erorile de măsurare.
μ =√∑ [ f2 / n]/ N,
unde - UPC cu un unghi;
f - rezidual în poligon;
N este numărul de poligoane;
n este numărul de colțuri din poligon.
4. Definirea elementelor suplimentare
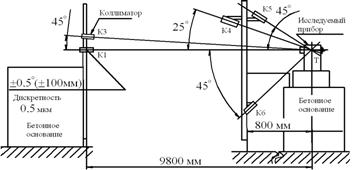
4.1 Scopul și metodele de determinare a elementelor suplimentare
Punctele adiționale sunt determinate, împreună cu rețeaua de filmare, în principal pentru a îngroșa rețeaua geodezică existentă cu puncte de filmare. Acestea sunt construite direct, invers, combinate și în prezența mijloacelor de măsurare electronice - serif liniar și metode cu raze.
În unele cazuri, un punct suplimentar este determinat de transferul (demolarea) coordonatelor de la vârful semnei la sol.
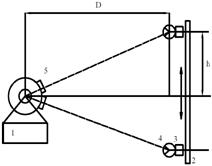
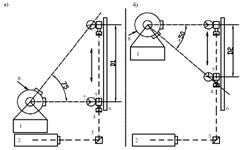
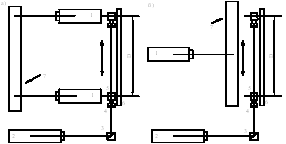
4.2 Transferul coordonatelor de la vârful semnului la sol. (Soluție de exemplu)
În producerea de lucrări topografice și geodezice în condiții urbane, este imposibil să se stabilească un teodolit într-un punct al unei rețele geodezice (punctul este biserica, antena etc.). Apoi, este sarcina de a demola coordonatele punctului de triangulație pe teren pentru a asigura producerea de lucrări geodezice în zonă.
Baseline: Punctul A cu coordonatele XA, YA; rețelele geodezice B (XB, YB) și C (XC, YC).
Măsurători de câmp: măsurări liniare ale bazelor selectate b1 și b "1; măsurări ale unghiurilor orizontale I1, I" 1, I2, I "2; b, b".
Este necesar să găsiți coordonatele punctului P - XP, YP.
Soluția problemei este împărțită în următoarele etape:
Rezolvarea unui exemplu numeric
Datele brute
Calcularea distanței DAR
Rezolvarea problemelor inverse
Calcularea unghiurilor direcționale αAR = αD
sin π ψ = Dσsinb / S AB; sin = 174,52CH0,66179 / 3068,48 = 0,03950;
sin ψ "= DЧsinб" / S АС; sin `= 174,52CH0,95061 / 5275,51 = 0,03292;
ψ = arcsin 0.03950 = 2 o15` 50``;
ψ "= arcsin 0.03292 = 1 o53` 13``;
φ = 180 o - (b + ψ) = 180 o - (138o33` 49`` + 2 o15` 50``) = 39o10` 41``
φ = 180 o - (b` + ψ`) = 180 o - (71o55` 02`` + 1 o53` 13``) = 106 o11` 46``
αD = αAB ± φ = 329o07` 55`` + 39o10` 41` = 8o18` 36``
αD` = αAC ± φ` = 262o07` 51`` + 106 o11` 46`` = 8o18` 37``
de control:
(αD - α "D) xmβ;
unde mβ este măsurarea FSC a unghiurilor orizontale.
Semnul "+" sau "-" în formulele pentru calcularea unghiului de direcție este luat în funcție de poziția relativă a punctelor A, P, B și C.
(8o18` 36``-8o18` 37``) ≤ 30``
0o00` 01`` ≤ 30``
Soluția problemelor directe (calculul coordonatelor tp)
Xp = XA + ΔX, Yp = YA + ΔY,
X "p = ХА + ΔХ", Y "p = YA + ΔY".
ΔX = DcosαD, ΔY = DsinαD,
ΔX "= Dcosα" D, ΔY "= Dsinα" D.
Diferența coordonatelor nu trebuie să depășească valoarea hmYaHp, unde p = 206265 ", mI - eroarea standard a măsurării unghiului.
Evaluarea corectitudinii determinării poziției punctului P.
Eroarea standard a definiției unui singur element este calculată prin formula:
M2p = m2X + m2Y, M2p = m2D + (D × mα / P) 2
unde mD - este determinat de precizia măsurărilor liniare și m α - prin precizia măsurătorilor unghiulare.
Exemplu: mD = 2cm, mα = 5``, apoi
Mp = √ [(0,02) 2+ (170 × 5/2 × 1010) 2] ≈ 2 × 10-2 = 0,02 m.
4.3 Soluția de rezecție directă și inversă (pentru varianta sarcinii)
Determinarea coordonatelor unui punct cu serif
Pentru o serifă de o singură dată, trebuie să ai două puncte solide. Controlul determinării se efectuează cu serif secundar din cel de-al treilea punct solid.
Linia de bază: punctele solide A (XAYA); B (XBYB); C (CHC).
Masuratori de camp: unghiuri orizontale β1, β2, β`1, β2.
Se determină punctul P.
Formule pentru rezolvarea problemei:
Xp -XA = ((XB-XA) ctg β 1+ (YB-YA)) / (ctg β 1+ ctg β 2);
Xp = XA + ΔXA;
Yp -YA = ((YB-YA) ctg β 1+ (XB-XA)) / (ctg β 1+ ctg β 2); Yp = YA + ΔYA;
Evaluarea corectitudinii determinării elementului P.
Calculul UPC din definițiile 1 și 2:
M1 = (mβCH√ (S12 + S22)) / pÞsinγ1;
M2 = (μβ √ (S12 + S22)) / pÎsinγ2;
Valorile incluse în formulele de mai sus sunt următoarele:
mb = 5``, p = 206265``; γ = 73˚15,9`; γ = 62˚55,7`; S1 = 1686,77 m; S2 = 1639,80 m; S3 = 2096,62 m.
Serifele laterale se găsesc din rezolvarea problemelor inverse.
M1 = (5''CH√2,86 + 2,69) / (2¼105Ч0,958) = 0,06 m.
M2 = (5''Ч√, 69 + 4,41) / (2 × 105 × 0,890) = 0,07m.
Mr = √ (M12 + M22); Mr = √ [(0,06) 2+ (0,07) 2] = 0,09 m.
Discrepanța dintre coordonatele celor două definiții
r = √ [(Xp-X`p) 2+ (Yp-Y`p) 2] nu trebuie să depășească valoarea lui 3 Mr;
r = √ [(2833.82-2833.82) 2+ (2116.38-2116.32) 2] = √0.0036 = 0.06 m.
Pe baza inegalității r = 0,06 m 3 × 0,09 m, este logic să se concluzioneze că definiția punctului P este calitativă.
Pentru valorile finale ale coordonatelor luați media celor două definiții.
Rezolvarea unui exemplu numeric
|
|
(XB-XA) ctgp1 |
|
||||
| XB- XA | YB-YA | |||||
| ctg β1 + ctg β2 4133,41 Caracteristicile fizice și geografice ale zonei de proiectare. Caracteristicile cadrului geodezic principal. Parametrii geometrici ai cursului (pe baza soluției de probleme geodezice inverse). Criterii de alungire. Curs de poligonometrie cu precizie de calcul. Ancheta obiectelor de gestionare a terenurilor și notificarea persoanelor ale căror drepturi pot fi afectate în timpul implementării lor. Determinarea limitelor obiectului managementului terenurilor pe teren, coordonarea și consolidarea acestora. Rețea geodezică de stat, de referință și anchetă. Alegerea metodelor de fotografiere și crearea cadrului geodezic. Planificarea altitudinii planificate a fotografiilor aeriene și interpretarea acestora. Elaborarea unui plan de îmbunătățire a eficienței muncii. Definiția field targets. Calculul cantității de lucru pe obiect. Principalele tipuri de desene geodezice. Semne distinctive ale planului și ale hărților. Verificarea și ajustarea elementară a teodolitului. Esența studiului geodezic. Suport geodezic pentru montarea coloanelor în pahare de fundații. Alinierea verticală a coloanelor. Metode de sondaj topografic. Teodolitul T-30 și lucrează cu el. Nivelarea teodolitului. Mental de fotografiere. Nivelarea suprafeței. Sondaj tahometric. Rezolvarea problemelor de inginerie pe plan. Analiza comparativă a metodelor topografice. Această publicație rezumă experiența utilizării metodelor de geodezie prin satelit pentru monitorizarea proceselor geodinamice care apar în întreprinderile miniere. Teoria diferitelor metode de nivelare trigonometrică. Erori de nivelare trigonometrică în funcție de precizia distanțelor măsurate. Metode geodezice pentru determinarea înălțimii centrelor punctelor rețelei geodezice de stat. Scopul calculelor preliminare în poligonometrie. Calcularea coordonatelor de lucru. Egalarea cantitatilor unghiulare si lineare. Calcularea greutăților valorilor ajustate ale coordonatelor unui punct nodal. Estimarea acurateței măsurătorilor de câmp și calcularea coordonatelor unui punct nodal. Stații electronice totale: tipuri, principiu de funcționare, principalele avantaje, aplicații și sarcini standard de aplicare. Verificarea stației electronice totale. Pregătirea taheometrului pentru cercetarea tahometrică și prelucrarea rezultatelor măsurătorilor. O tehnică care permite utilizarea unui algoritm recurent pentru a controla erorile brute și egalizarea ulterioară a rețelelor geodezice la observarea deformărilor structurilor de inginerie și a suprafeței pământului. Blocul programului de analiză a deformărilor planificate. Examinarea modalităților de formare a terenurilor (secțiune, divizare, asociere, redistribuire) și reglementarea de stat a dreptului de proprietate. Învățarea elementelor de bază ale înregistrării cadastrale. Descrierea procesului de creare a unei rețele geodezice planificate. Masterat metoda de prelucrare matematică a rezultatelor măsurărilor geodezice în rețelele de îngroșare. Calculul coordonatelor punctelor suplimentare, definite de serifele multiple de colț directe și inverse. Egalarea sistemului de poligonometrie. Cunoașterea instrumentelor geodezice. Caracteristici design ale teodolitului 4T30, nivel 3Н-5Л și stația electronică totală 3Ta5. Geometric, trigonometric, hidrostatic, nivelare barometrică. Sondaj tahometric de automatizare. Caracteristicile semnelor de fixare a rețelelor geodezice, clasificarea lor în funcție de valoare, locație, desemnarea lor în teren. Clădiri rezidențiale, publice, industriale. Etape de producție a lucrărilor geodezice în timpul construcției obiectului. Echilibrarea triangulării, a sistemelor de mișcări ale rețelei planificate de cercetare, teodolitul se mișcă cu un punct nodal și unghiurile rețelei de mișcări teodolite și poligonometrice prin aproximări succesive. Schema de calcul a unghiurilor direcționale ale liniilor de referință. |
3.2 Clasificarea erorilor de măsurători geodezice. Eroare RMS. Formele lui Gauss și Bessel pentru calculul lui
Măsurătorile geodezice efectuate chiar și în condiții foarte bune sunt însoțite de erori, adică abaterea rezultatului măsurării L de valoarea reală X a cantității numerotate:
Adevărata este o valoare a unei cantități măsurabile care ar reflecta în mod ideal proprietățile cantitative ale unui obiect. Condiția inaccesibilă - adevărata valoare - este un concept ipotetic. Aceasta este o valoare care poate fi abordată aproape infinit, nu este posibilă.
Precizia măsurării - gradul de aproximare a rezultatului său la valoarea reală. Cu cât eroarea este mai mică, cu atât este mai mare precizia.
Eroarea absolută este exprimată prin diferența dintre valoarea obținută ca rezultat al măsurării și măsurarea reală a mărimii. De exemplu, valoarea adevărată de l = 100 m, totuși, atunci când se măsoară aceeași linie, rezultatul este de 100,05 m, atunci eroarea absolută:
E = X este - X
E = 100,05 - 100 = 0,05 (m)
Pentru a obține valoarea este suficient să faceți o măsurătoare. Se numește necesar, dar mai des nu se limitează la o singură dimensiune, ci se repetă de cel puțin două ori. Măsurătorile care depășesc ceea ce este necesar se numesc redundante (suplimentare), ele reprezintă un mijloc foarte important de monitorizare a rezultatelor măsurătorilor.
Eroarea absolută nu oferă o idee despre acuratețea rezultatului. De exemplu, o eroare de 0,06 m poate fi obținută prin măsurarea l = 100 m sau l = 1000 m. Prin urmare, se calculează eroarea relativă:
C = 0,06 / 100 = 1/1667, adică la 1667 m măsurat l, a fost făcută o eroare de 1 metru.
Eroare relativă - raportul dintre eroarea absolută și valoarea adevărată sau măsurată. Fracțiune expresie. Conform instrucțiunilor, linia de teren nu trebuie măsurată mai mult de 1/1000.
Erorile care rezultă din factorii individuali sunt numiți elementari. Eroarea generalizată este suma elementelor elementare.
Există:
· Coarse (Q),
· Sistematic (O),
· Random (Δ).
Erorile de măsurare greșite apar ca urmare a greselilor, a erorilor contractantului, a neglijenței sale, a defectelor neobservate ale mijloacelor tehnice. Dificultățile greșite sunt complet inacceptabile și ar trebui să fie complet excluse din rezultatele măsurătorilor prin măsurători repetate și suplimentare.
Erorile de măsurare sistematice - componenta constantă asociată cu defectele: viziune, funcționare defectuoasă a mijloacelor tehnice, temperatură. Erorile sistematice pot fi atât unilaterale, cât și variabile (erori periodice). Ori de câte ori este posibil, ele se caută să fie luate în considerare sau excluse din rezultatele măsurătorilor atunci când se organizează și se desfășoară activități.
Erorile de măsurare aleatorie însoțesc în mod inevitabil toate măsurătorile. Erorile aleatorii nu pot fi excluse, însă influența lor asupra rezultatelor dorite poate fi redusă prin efectuarea unor măsurători suplimentare. Acestea sunt cele mai insidioase erori asociate cu toate măsurătorile. Poate fi diferit atât în dimensiune, cât și în semn.
Dacă erorile brute și sistematice pot fi studiate și excluse din rezultatul măsurătorilor, se pot lua în considerare erorile aleatorii pe baza unei măsurători profunde. Studiu bazat pe teoria probabilităților.
În practică, dificultatea constă în faptul că măsurătorile sunt efectuate de un număr limitat de timp și, prin urmare, pentru a estima corectitudinea măsurătorilor, se utilizează o estimare aproximativă a deviației standard, numită eroarea RMS.
Gauss a fost propusă o formulă pentru eroarea medie pătrată:
Δ 2 cf = (Δ 2 1 + Δ 2 2 + ... + Δ 2 n) / n,
Δ 2 = m 2 = (Δ 2 1 + Δ 2 2 + ... + Δ 2 n) / n,
Δ cf = m = √ (Σ Δ 2 i / n)
Formula se aplică atunci când erorile sunt calculate din valorile reale.
Formula Bessel:
m = √ (ΣV 2 i / (n-1))
Eroarea rms a mediei aritmetice este Ön ori mai mică decât eroarea rms a unei măsurători individuale.
Atunci când se estimează, eroarea standard cu o greutate egală cu una este folosită ca unitate de măsură a preciziei. Se numește eroarea pătrată medie a unei unități de greutate.
μ 2 = P × m 2 - μ = m √ P, m = μ / P, adică eroarea medie pătrată a oricărui rezultat al măsurării este egală cu eroarea de măsurare cu o greutate de 1 μ și împărțită la rădăcina pătrată a greutății acestui rezultat (P).
Pentru un număr suficient de mare de măsurători, putem scrie Σμ 2 P = ΣΔ 2 P (din moment Δ = m):
μ = √ (Σ (Δ 2 × P) / n), adică eroarea medie de măsurare pătratică cu o greutate egală cu 1 este egală cu rădăcina pătrată a fracțiunii în numărătorul căruia este suma produselor din pătratele de eroare absolută ale măsurătorilor dimensionale inegale pe greutățile lor, iar în numitor numărul de măsurători inegal-dimensionale.
Eroarea pătrată medie a mediei aritmetice totale prin formula:
M 0 = μ / √ΣP
Înlocuind μ pentru valoarea sa, obținem:
M 0 = √ (ΣΔ 2 × P / n) / (√ΣP) = √ [(ΣΔ 2 × P) / n × (ΣP)]
M 0 = √ [(Δ 1 2 P 1 + Δ 2 2 P 2 + ... + Δ n 2 P n) / n × (P 1 + P 2 + ... + P n)] este formula Gauss, centrul aritmetic este egal cu rădăcina pătrată a fracțiunii, a cărui numărător este suma produselor din pătratele erorilor măsurătorilor curenților inegali pentru greutățile lor, iar numitorul este rezultatul numărului de măsurători pentru suma greutății lor.
μ = √ [Σ (V 2 × P) / (n-1)] Aceasta este formula Bessel pentru calculul erorii medii aritmetice cu o masurare a greutății de 1 pentru o serie de măsurători de lungime egală pe baza erorilor lor probabile. Este valabil pentru un număr mare de măsurători, iar pentru un interval limitat (adesea în practică) acesta conține erori: μ μ = μ / este fiabilitatea estimării μ.
Testați problema 1
Pentru a studia teodolitul, el a măsurat în mod repetat același unghi. Rezultatele au fost următoarele: 39,17,4 "; 39,16,8"; 39˚16,6 "; 39˚16,2"; 39,15,5 "; 39,15,8"; 39˚16,3 "; 39˚16,2". Același unghi a fost măsurat cu un dispozitiv goniometric de înaltă precizie, care a dat un rezultat de 39 4216 "42". Luând această valoare pentru corectitudine, calculați eroarea standard a pătratului, determinați fiabilitatea UPC, găsiți eroarea marginală.
| Numărul de măsurători | Rezultatele măsurării, l | erori | ∆2 |
| 1 | 39˚17.4 " | +0.7" | 0.49 |
| 2 | 16.8 | +0.1 | 0.01 |
| 3 | 16.6 | -0.1 | 0.01 |
| 4 | 16.2 | -0.5 | 0.25 |
| 5 | 15.5 | -1.2 | 1.44 |
| 6 | 15.8 | -0.9 | 0.81 |
| 7 | 16.3 | -0.4 | 0.16 |
| 8 | 16.2 | -0.5 | 0.25 |
| sumă | 3.42 |
39˚16 "42" = 39˚16,7 "
Eroare RMS: m = √ ([Δ 2] / n),
m = √ (3,42 / 8) = 0,65 ".
Evaluarea fiabilității UPC: m m = m / √2n,
m m = 0,65 / √16 = 0,1625 ≈ 0,16 ".
Eroare de eroare: Δ pr = 3 × m,
Δ pr = 3 x 0,65 "= 1,96"
Testarea 2
Având în vedere un set de reziduuri de triunghiulare volum de triangulare de 50 de unități. Presupunând că discrepanțele sunt erori reale, calculați eroarea medie pătrată și obțineți fiabilitatea UPC, calculați eroarea marginală. Pe acest set, verificați proprietatea de eroare aleatorie:
Lim [Δ] / n = 0, pentru care calculam W = [W] / n.
| N | W | N | W | N | W | N | W | N | W |
| 1 | +1,02 | 11 | -1,72 | 21 | -0,90 | 31 | +2,80 | 41 | -0,44 |
| 2 | +0,41 | 12 | +1,29 | 22 | +1,22 | 32 | -0,81 | 42 | -0,28 |
| 3 | +0,02 | 13 | -1,81 | 23 | -1,84 | 33 | +1,04 | 43 | -0,75 |
| 4 | -1,88 | 14 | -0,08 | 24 | -0,44 | 34 | +0,42 | 44 | -0,80 |
| 5 | -1,44 | 15 | -0,50 | 25 | +0,18 | 35 | +0,68 | 45 | -0,95 |
| 6 | -0,25 | 16 | -1,89 | 26 | -0,08 | 36 | +0,55 | 46 | -0,58 |
| 7 | +0,12 | 17 | +0,72 | 27 | -1,11 | 37 | +0,22 | 47 | +1,60 |
| 8 | +0,22 | 18 | +0,24 | 28 | +2,51 | 38 | +1,67 | 48 | +1,85 |
| 9 | -1,05 | 19 | -0,13 | 29 | -1,16 | 39 | +0,11 | 49 | +2,22 |
| 10 | +0,56 | 20 | +0,59 | 30 | +1,65 | 40 | +2,08 | 50 | -2,59 |
W = [W] / n, W = + 2,51 / 50 = 0,05
Eroarea standard în acest caz, se recomandă să se calculeze prin formula: m = √ (- [W] 2 / n) ÷ (n-1)
m = √ (76,5703 - (2,51 2) / 50) ÷ 49 = 1,249
Evaluarea fiabilității UPC prin formula: m m = m / √2 (n-1),
m m = 1,249 / √ (2 × 49) = 0,13.
Eroare de eroare în funcție de formula: Δ pr = 3 × m,
Δ pr = 3 x 1,249 = 3,747.
Sarcina de control 5 Stabiliți distanța UPC calculată de formula
S = √ (x 2 - x 1) 2 + (y 2 - y 1) 2
dacă x 2 = 6,068,740 m; y2 = 431,295 m;
x 1 = 6 068 500 m; y2 = 431 248 m;
m x = m y = 0,1 m.
S = √ (6 068 740 - 6 068 500) 2 + (431 295 - 431 248) 2 = 235,36
m m = 0,1 / √4 = 0,05
Ținta 6
Acelasi unghi a fost masurat de 5 ori cu rezultatele: 60˚41 "; 60˚40"; 60 ° 40 "; 60 ° 42"; 60˚41 ". Efectuați procesarea matematică a acestei serii de rezultate de măsurare.
| Nn / n | l, ˚ | ε, " | v, " | v2, " |
| 1 | 60˚41 " | 1 | -0,2 | 0,04 |
| 2 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 3 | 60 ° 40 " | 0 | +0,8 | 0,64 |
| 4 | 60˚42 " | 2 | -1,2 | 1,44 |
| 5 | 60˚41 " | 1 | -0,2 | 0,04 |
| sumă | 4 | 0 | 2,8 |
l 0 este valoarea minimă a cantității măsurate, l 0 = 60˚40 ", ε este restul obținut ca ε = l 1 - l 0, L este cea mai bună valoare a cantității măsurate,
L = [l] / n; m = √ ([v 2] / (n - 1), unde v este abaterea de la media aritmetică M este estimarea corectitudinii valorii medii aritmetice M = m / √ n.
L = 60˚40 "+ 4/5 = 60˚40,8"
m = √2,8 / 4 = 0,7 "
M = 0,7 "/ √5 = 0,313"
Activitatea de verificare 7
Efectuați o prelucrare matematică a rezultatelor măsurării de către planimetrul zonei cu același contur: 26.31; 26.28; 26,32; 26.26; 26,31 ha.
| Nn / n | eu, ha | ε, ha | v, ha | v2, ha |
| 1 | 26,31 | 0,05 | -0,014 | 0,000196 |
| 2 | 26,28 | 0,02 | +0,016 | 0,000256 |
| 3 | 26,32 | 0,06 | -0,024 | 0,000576 |
| 4 | 26,26 | 0 | 0,036 | 0,001296 |
| 5 | 26,31 | 0,05 | -0,014 | 0,000576 |
| sumă | 0,18 | 0 | 0,0029 |
L = 26,26 + 0,18 / 5 = 26,296 ha
m = √0.0029 / 4 = 0.0269 ha
M = 0,0269 / √5 = 0,01204 ha
Verificarea provocării 8
În studiul diviziunilor centimetrice ale barei de nivelare cu ajutorul liniei de la Geneva, temperatura a fost determinată la momentul preluării raportului. Pentru segmente de cinci centimetri s-au obținut următoarele valori: 20,3˚; 19,9˚; 20,1˚; 20,2˚; 20,3˚. Pentru a efectua procesarea matematică a rezultatelor măsurătorilor.
| Nn / n | l, ˚ | ε, ˚ | v, ˚ | v2, ˚ |
| 1 | 20,3 | 0,4 | -0,14 | 0,0196 |
| 2 | 19,9 | 0 | -0,26 | 0,0676 |
| 3 | 20,1 | 0,2 | -0,06 | 0,0036 |
| 4 | 20,2 | 0,3 | 0,04 | 0,0024 |
| 5
Nu vor fi necesare, atunci instrumentul trebuie dezvoltat manual, dacă este justificat din punct de vedere al timpului petrecut și a resurselor materiale. 2. Prelucrarea masurarilor geodezice folosind foi de calcul Pentru prelucrarea initiala a informatiilor obtinute ca urmare a unui complex de lucrari topografice si geodezice, am folosit programul TOGI, care este un pachet ...
La șantierul de construcție este necesar să se respecte cerințele standardelor și regulilor de siguranță descrise în capitolul SNiP Sh-4-80 "Siguranța în construcții" și instrucțiunile departamentale. Persoanelor care au fost instruite prin ordinul de gestiune a construcțiilor li se permite să efectueze lucrări geodezice. Riscul de accidentare sau rănire este determinat în funcție de condițiile lucrătorului ...
Dispozitive electronice cu participarea directă a autorului. Capitolul al doilea În cel de-al doilea capitol sunt revizuite metodele dezvoltate de efectuare a cercetărilor privind instalațiile metrologice și băncile pentru verificarea și calibrarea instrumentelor geodezice pentru măsurarea înălțimilor. Metoda de studiere a erorii de scurtă durată a măsurării unghiurilor verticale ale instrumentelor geodezice. O sarcină importantă în studiu ... |
PROCESAREA REZULTATELOR MĂSURĂRII
În practica fizică
Măsurători și erori de măsurare
Fizica este o știință experimentală, ceea ce înseamnă că legile fizice sunt stabilite și verificate prin acumularea și compararea datelor experimentale. Scopul atelierului fizic este de a învăța din experiență principalele fenomene fizice, de a învăța cum să măsuram corect valorile numerice ale cantităților fizice și să le comparăm cu formulele teoretice.
Toate măsurătorile pot fi împărțite în două tipuri - drepteși indirect.
la direct măsurătorilor, valoarea dorită este obținută direct din citirile dispozitivului de măsurare. De exemplu, lungimea este măsurată cu o riglă, timpul cu ora, etc.
Dacă cantitatea fizică dorită nu poate fi măsurată direct de dispozitiv și este exprimată printr-o formulă prin valori măsurate, atunci astfel de măsurători sunt numite indirect.
Măsurarea oricărei valori nu oferă o valoare exactă a acestei valori. Fiecare măsurătoare conține întotdeauna o eroare (eroare). Eroare este diferența dintre valoarea măsurată și cea reală.
Erori sunt de obicei împărțite în sistematic și întâmplător.
sistematic apelați eroarea, care rămâne constantă pe toată durata măsurătorilor. Astfel de erori se datorează imperfecțiunii instrumentului de măsurare (de exemplu compensarea zero a dispozitivului) sau a metodei de măsurare și pot fi, în principiu, excluse din rezultatul final prin introducerea unei corecții adecvate.
Erorile sistematice includ și eroarea dispozitivelor de măsurare. Acuratețea oricărui instrument este limitată și se caracterizează prin clasa de precizie, care, de regulă, este indicată pe scara de măsurare.
întâmplător se numește o eroare, care variază în diferite experimente și poate fi atât pozitivă, cât și negativă. Erorile accidentale se datorează cauzelor care depind atât de dispozitivul de măsurare (frecare, goluri etc.), cât și de condițiile externe (vibrații, fluctuații de tensiune în rețea etc.).
Erorile accidentale nu pot fi eliminate empiric, însă efectul acestora asupra rezultatelor poate fi redus prin măsurători repetate.
Valoarea medie și eroarea medie absoluta.
Să presupunem că vom efectua o serie de măsurători ale magnitudinii lui X. Datorită prezenței unor erori aleatorii, ajungem n valori diferite:
X 1, X 2, X 3 ... X n
O valoare medie este de obicei luată ca rezultat al măsurării.
Diferența dintre medie și rezultat i -măsurarea măsurătorii se numește eroarea absolută a acestei măsurători.
Ca măsură a erorii mediei, se poate lua valoarea medie a erorii absolute a unei măsurători individuale.
 (2)
(2)
valoare  se numește eroarea medie (sau medie absolută) aritmetică.
se numește eroarea medie (sau medie absolută) aritmetică.
Apoi rezultatul măsurătorii trebuie să fie scris ca
 (3)
(3)
Pentru a caracteriza acuratețea măsurătorilor este eroarea relativă, care este de obicei exprimată ca procent
 (4)
(4)
Eroare medie în formă de pătrat.
În măsurătorile critice, atunci când este necesar să se cunoască fiabilitatea rezultatelor obținute, este utilizată eroarea standard (sau deviația standard), determinată de formula
 (5)
(5)
Valoarea caracterizează abaterea unei singure unități față de valoarea reală.
Dacă am calculat prin n măsurători înseamnă  prin formula (2), atunci această valoare va fi mai precisă, adică va fi mai puțin diferită de cea reală decât fiecare dimensiune individuală. Eroare medie pătrată a mediei
prin formula (2), atunci această valoare va fi mai precisă, adică va fi mai puțin diferită de cea reală decât fiecare dimensiune individuală. Eroare medie pătrată a mediei  este
este
 (6)
(6)
unde este eroarea rms a fiecărei măsurători individuale, n - numărul măsurătorilor.
Astfel, prin creșterea numărului de experimente, se poate reduce eroarea aleatorie în valoarea medie.
În prezent, rezultatele măsurătorilor științifice și tehnice sunt de obicei prezentate sub formă
 (7)
(7)
După cum arată teoria, cu o astfel de înregistrare, cunoaștem fiabilitatea rezultatului obținut, și anume, adevărata valoare X68% ar putea fi diferită nu mai mult de .
Atunci când se folosește eroarea medie aritmetică (absolută) (formula 2), nu se poate spune nimic despre fiabilitatea rezultatului. Câteva idei despre acuratețea măsurătorilor în acest caz dau o eroare relativă (formula 4).
La efectuarea lucrărilor de laborator, elevii pot folosi atât eroarea absolută medie, cât și eroarea medie pătrată. Care dintre ele să fie aplicată este indicată direct în fiecare lucrare specifică (sau indicată de către profesor).
De obicei, dacă numărul măsurătorilor nu depășește 3 - 5, se poate folosi o eroare medie absolută. Dacă numărul de măsurători este de aproximativ 10 sau mai mult, atunci ar trebui să se utilizeze o estimare mai corectă folosind eroarea medie pătrată a mediei (formulele 5 și 6).
CONTUL DE ERORI SISTEMICE.
Prin creșterea numărului de măsurători, numai erorile aleatorii ale experienței pot fi reduse, dar nu sistematice.
Valoarea maximă a unei erori sistematice este de obicei indicată pe dispozitiv sau în pașaport. Pentru măsurători utilizând o riglă metalică convențională, eroarea sistematică este de cel puțin 0,5 mm; pentru măsurători cu un șubler -
0,1 - 0,05 mm; micrometru - 0,01 mm.
Adesea jumătate din prețul diviziunii de instrumente este considerată o eroare sistematică.
Cântarele aparatelor de măsură electrice indică clasa de precizie. Cunoscând clasa de exactitate K, este posibil să se calculeze eroarea sistematică a dispozitivului ΔΧ cu formula
unde K este clasa de precizie a instrumentului, X pr este valoarea limită care poate fi măsurată pe scara instrumentului.
Deci, clasa de 0,5 amperi cu o scară de până la 5A măsoară curentul cu o eroare de nu mai mult de

Eroarea dispozitivului digital este egală cu unitatea celei mai mici cifre afișate.
Valoarea medie a erorii totale constă din întâmplătorși sistematicerori.

Răspunsul cu erori sistematice și aleatorii este înregistrat în formular
ERORI DE MĂSURĂRI INDIRECTE
În experimentele fizice se întâmplă deseori ca cantitatea fizică dorită să nu poată fi măsurată prin experiență, ci este o funcție a altor cantități măsurate direct. De exemplu, pentru a determina volumul unui cilindru, este necesar să se măsoare diametrul D și înălțimea hși apoi calculați volumul utilizând formula
valoare Dși hva fi măsurată cu o anumită eroare. În consecință, valoarea calculată V se va dovedi, de asemenea, cu unele erori. Trebuie să puteți exprima eroarea valorii calculate prin erorile valorilor măsurate.
Ca și în cazul măsurărilor directe, este posibil să se calculeze eroarea medie medie (aritmetică medie) sau eroarea medie pătrată.
Regulile generale pentru calcularea erorilor pentru ambele cazuri sunt derivate folosind calculul diferențial.
Lăsați valoarea dorită φ să fie o funcție a mai multor variabile X, Y,Z…
φ( X, Y,Z…).
Prin măsurători directe, putem găsi valorile  și, de asemenea, să evalueze erorile medii absolute
și, de asemenea, să evalueze erorile medii absolute  ... sau erori pătrate medii X, Y, Z ...
... sau erori pătrate medii X, Y, Z ...
Apoi, eroarea medie aritmetică este calculată prin formula

unde  - derivați parțiali ai lui φ prin X, Y,Z.
Acestea sunt calculate pentru valorile medii …
- derivați parțiali ai lui φ prin X, Y,Z.
Acestea sunt calculate pentru valorile medii …
Eroarea medie pătrată este calculată prin formula
Un exemplu.Rezultă formulele de eroare pentru calculul volumului cilindrului.
a) Eroarea medie aritmetică.
valoare D și h măsurată în consecință cu o eroare D și h.
b) eroarea medie pătrată.
valoare D și h măsurată corespunzător cu eroarea D, h .
Eroarea volumului va fi egală cu
Dacă formula reprezintă o expresie convenabilă pentru logaritmizare (adică un produs, fracțiune, grad), atunci este mai convenabil să se calculeze mai întâi eroarea relativă. Pentru aceasta (în cazul erorilor medii aritmetice), trebuie efectuate următoarele.
1. Prologizați expresia.
2. Diferențiați-l.
3. Combinați toți termenii cu același diferențial și scoateți-l din paranteze.
4. Luați expresia în fața diferitelor modulații diferențiale.
5. Înlocuiți insignele diferențiale d pe icoane de eroare absolută .
Rezultatul este o formulă pentru eroarea relativă
Apoi, știind , puteți calcula eroarea absolută
=
Un exemplu.
În mod similar, putem scrie eroarea medie pătrată relativă
Regulile pentru prezentarea rezultatelor măsurătorilor sunt următoarele:
eroarea ar trebui rotunjită la o singură cifră semnificativă:
corect = 0,04,
greșit - = 0.0382;
ultima cifră semnificativă a rezultatului trebuie să aibă aceeași ordine de mărime ca eroarea:
corect = 9.830.03,
greșit - = 9,8260,03;
dacă rezultatul are o valoare foarte mare sau foarte mică, este necesar să se utilizeze forma indicativă a înregistrării - aceeași pentru rezultatul și eroarea sa, iar punctul zecimal ar trebui să urmeze prima cifră semnificativă a rezultatului:
corect - = (5.270.03) 10 -5,
greșit - = 0.00005270.0000003,
= 5.27 ÷ 10 -5 0.0000003,
= = 0,00005273,10 -7,
= (5273) 10 -7,
= (0,5270,003) 10-4.
Dacă rezultatul are o dimensiune, trebuie să-l specificați:
corect - g = (9,820,02) m / s 2,
incorect - g = (9,820,02).
Reguli de plotare
1. Graficele sunt construite pe hârtie graf.
2. Înainte de plotare, este necesar să se definească clar ce variabilă este un argument și care este o funcție. Valorile argumentului sunt reprezentate pe axa x (axa lui x), valorile funcțiilor sunt pe axa y (axa la).
3. Din datele experimentale pentru a determina limitele de schimbare a argumentului și a funcției.
4. Indicați cantitățile fizice depuse pe axele de coordonate și desemnați unitățile de cantități.
5. Puneți în diagramă punctele experimentale, indicându-le (cruce, cerc, punct îndrăzneț).
6. Desenați o curbă netedă (linia dreaptă) prin punctele experimentale astfel încât aceste puncte să fie situate în număr aproximativ egal pe fiecare parte a curbei.
Tipuri de erori. Eroare RMS. - secțiunea Educație, sisteme de coordonate folosite în navigație: sferice, polare, ortodromice. Tipuri de erori. Aproape întotdeauna eroare inclusă ...
Tipuri de erori.Aproape întotdeauna, eroarea include două părți din ea: sistematică și aleatorie.
Δa = Δa sist + Δ un caz.
sistematicse numește eroarea, care în aceste condiții păstrează o valoare constantă (sau modificări, dar conform unei legi cunoscute).
Astfel de erori sunt cauzate de cauze care acționează în mod constant, ca rezultat al căruia, în timpul măsurării, eram "erați" de fiecare dată cu aceeași sumă. Foarte des, astfel de erori sunt cauzate de fabricarea inexactă a instrumentului (erori instrumentale) sau de un factor extern constant. De exemplu, câmpul magnetic propriu al aeronavei cauzează o eroare în măsurarea cursului magnetic (abatere), care în fiecare curs are o valoare definită.
Erorile sistematice, deoarece sunt aceleași pentru fiecare măsurătoare, pot fi determinate o dată cu ajutorul unor instrumente mai precise și apoi excluse din rezultatele măsurătorilor prin introducerea corecțiilor.
Erorile sistematice nu provoacă prea multe probleme la navigare, deoarece după eliminarea lor ele sunt deja absente. Prin urmare, vom presupune în continuare că nu există erori sistematice (deja luate în considerare).
Eroare la întâmplareîn fiecare măsurătoare are o valoare diferită și nu se știe în prealabil care dintre acestea.
Dar, în principiu, erorile aleatorii nu pot fi eliminate, deoarece ele sunt diferite la fiecare măsurătoare. Și întotdeauna rămân necunoscute.
Este imposibil să se determine valorile numerice ale erorilor aleatorii, însă pilotul trebuie să țină cont în permanență de existența acestor erori și să aibă o idee despre valorile posibile. Prezența incertitudinii în rezultatele măsurătorilor este unul dintre principalii factori care complică navigația și nu numai că o face știință și artă.
Evenimentul întâmplător este un eveniment care, în condițiile date, poate sau nu poate să apară. Gradul de posibilitate al unui astfel de eveniment este numeric caracterizat de magnitudinea probabilității. Probabilitatea P este un număr care poate varia de la 0 la 1. Dacă un eveniment nu apare niciodată în aceste condiții, el este numit un eveniment imposibil și probabilitatea lui este zero. Dacă se întâmplă întotdeauna în condițiile date, atunci se numește autentică și se creditează cu o probabilitate egală cu una. Dacă, de exemplu, P = 0,3, înseamnă că, în medie, în 30 de cazuri din 100, evenimentul va avea loc. Este în medie, deoarece evenimentul este întâmplător. Dacă creați condițiile necesare pentru apariția unui eveniment și efectuați o serie de 100 de experimente, atunci un eveniment poate să apară, de exemplu, de 23 de ori sau de 32 de ori ... Dacă efectuați mai multe serii de astfel de experimente sau o serie de o mie, zece mii și milioane de experimente, cu cât numărul de experimente efectuate este mai mare, cu atât numărul mediu de evenimente ale evenimentului va fi mai aproape de 30% din numărul total de experimente (dacă P = 0,3).
Cum pot fi descrise erorile aleatorii daca nu au nici un sens special? Adesea ele sunt caracterizate de eroarea medie pătrată (CSP), care este notată cu litera σ (sigma). De exemplu, măsurătorile UPC ale cantității a vor fi notate cu σa.
UPC este o caracteristică a gradului de dispersie a valorii măsurate a unei cantități în jurul valorii actuale. Cu cât este mai mare σa, cu atât sunt mai împrăștiate (împrăștiate) valorile măsurate în diferite experimente în jurul valorii efective a cantității.
În fig. 2.19 sunt reprezentate geometric sub forma unei valori posibile a axei numerice a valorii măsurate oși a notat valoarea sa reală. Traversele de pe scară indică valorile măsurate obținute ca rezultat al mai multor experimente. În primul caz, scatterul valorilor măsurate în jurul valorii de real este mai mare decât în cel de-al doilea caz, de aici "sigma", care caracterizează gradul de împrăștiere, în cel de-al doilea caz este mai mică.
Fig. 2.19. Eroare RMS
Conform valorii EUC, se poate aprecia probabilitatea ca valoarea măsurată să ia una sau alta valoare. Dar, pentru aceasta, nu este suficient să cunoașteți EUC, de asemenea, trebuie să știți care este legea de distribuție care face obiectul unei erori aleatorii date. Multe variabile aleatoare respectă legea normală de distribuție (Gaussiană). Pentru această lege este util să vă amintiți următoarele valori.
Dacă nu există o eroare sistematică și în urma măsurării, se obține valoarea aismului, atunci valoarea reală a cantității se află în interiorul (Figura 2.20):
aism ± σa cu probabilitate P = 0,68;
aism ± 2σa cu probabilitate P = 0,95;
aism este ± 3σa cu probabilitate P = 0,997.
Fig. 2.20. Unele probabilități pentru distribuirea normală
De exemplu, folosind o busolă, se măsoară cursul γ = 100º, iar precizia compasului este caracterizată de EUC de σγ = 2º. Aceasta înseamnă că rata reală (care ne va rămâne necunoscută) în medie:
în 68 de cazuri din 100 se situează în limitele a 100º ± 2º, adică în intervalul 98º ... 102º;
în 95 cazuri din 100 se situează în limitele de 100 ° ± 4 °, adică în intervalul 96 ° ... 104 °;
în 997 cazuri din 1000 se situează în limitele a 100º ± 6º, adică în intervalul 94º ... 106º.
Valoarea probabilității P= 0.997 este atat de aproape de faptul ca valoarea corespunzatoare a erorii in "trei sigma" este adesea numita eroare maxima. De fapt, eroarea poate să o depășească. Adevărat, rar - în medie, în trei cazuri dintr-o mie.
În descrierile tehnice ale instrumentelor și echipamentelor, precizia lor poate fi indicată direct sub forma UPC și atunci totul este clar. Dar, uneori, este indicat, de exemplu, după cum urmează: "eroare de măsurare a rulmentului ± 1,5º". Desigur, acest lucru nu înseamnă că un astfel de căutător de direcție este "greșit" de fiecare dată cu 1,5 grade. De asemenea, nu înseamnă că el nu poate fi confundat. mai multdecât 1,5 °. De regulă, valoarea specificată a erorii corespunde probabilității P= 0,95. Aceasta este, în medie, în 95 de cazuri din 100, eroarea nu va depăși (în sus sau în jos) valorile de 1,5º.
În consecință, în cinci cazuri din o sută, eroarea ar putea fi mai mare. Pentru legea normală de distribuție a erorilor, probabilitatea de 0,95 corespunde de două oriUPC. Prin urmare, măsurarea UCS a rulmentului în acest exemplu va fi de 0,75º.
Sfârșitul activității -
Acest subiect aparține:
Fig. Sistemul de coordonate polar ... Distanta distanta de la originea sistemului de coordonate la punctul obiect ...
Dacă aveți nevoie de material suplimentar pe această temă sau nu ați găsit ceea ce căutați, vă recomandăm să utilizați căutarea în baza noastră de date:
Dacă acest material s-a dovedit a fi util pentru dvs., îl puteți salva pe pagina dvs. pe rețelele sociale:
| Tweet |
Sisteme de coordonate utilizate în navigație (sferice, polare, ortodromice).
Dacă nu este necesară precizia foarte mare a rezolvării problemelor de navigație, atunci Pământul poate fi considerat ca o sferă. În acest caz, se folosește sistemul normal de coordonate sferice, polii din care
Elemente de navigație și de zbor.
Elemente aerobatice. Navigarea și pilotarea sunt procese de control al traficului aerian. Pentru a descrie această mișcare, se folosesc valori numite navigație și acrobație.
Vânt și caracteristicile sale. Vânt echivalent.
Masele de aer atmosferice sunt aproape întotdeauna în mișcare, care sunt cauzate de diferențele de temperatură și presiune în diferite regiuni ale pământului. Sunt studiate cauzele și natura unei astfel de mișcări
Viteze de triunghi de navigație. Dependența vitezei la sol și a unghiului de alunecare la unghiul vântului.
Soarele se mișcă în raport cu masa aerului cu viteza reală a aerului V, masa aerului relativ la pământ la o viteză U și viteza soarelui în mișcare relativ la
Principii de măsurare a cursului și tipuri de echipamente de curs.
Cursul caracterizează direcția axei longitudinale a aeronavei în plan orizontal, adică arată unde este îndreptată "nasul" aeronavei. Este important pentru navigație, pentru că în același timp
Deviația, tipurile, contabilitatea în zbor.
Este evident că în același punct din spațiu nu pot exista simultan două câmpuri magnetice, doi vectori de intensitate - Pământul (H) și planul (F). acestea
Recomandări practice privind utilizarea compaselor magnetice.
1. Trebuie amintit că în regiunile polare, unde înclinația magnetică este mare și, prin urmare, componenta orizontală a câmpului magnetic al Pământului este mică, compasurile magnetice sunt instabile și pot
Principiul de măsurare a cursului giroscopic. Axa de expunere a giroscopului, corecția orizontală și azimutală.
Un giroscop (din greaca antică la "rotire" și "aspect") este în esență orice corp rotativ. În tehnologia modernă, giroscopul este un rotor destul de masiv la viteză mare.
Gyropolukompas GPK-52. Ortodromicitatea giroscopului.
Gyropolukompas GPK-52. Principiul de funcționare a dispozitivelor giroscopice vor fi luate în considerare pe baza exemplului unuia dintre cele mai simple dispozitive de acest tip - semicascrul giroscopic GPC-52.
Giroul cursului ortodrom
Acum, după analizarea comportamentului giroscopului pe un plan staționar, vom analiza modul în care se va comporta atunci când avionul se va deplasa de-a lungul unei linii ortodromice. Caz general - n
Meridianul de referință și cursul ortodromic. Ratele de conversie.
Axa giroscopului la începutul zborului poate fi reglată în orice direcție. Piloții sunt obișnuiți cu faptul că cursul 0 ° este spre nord, 90 ° la est, etc. Prin urmare, valorile numerice ale girului
Informații de bază despre sistemele de curs. Modul de corecție magnetică.
Fiecare dintre cele două principii considerate de măsurare a cursului - magnetic și giroscopic - are propriile sale avantaje și dezavantaje. Compassul magnetic are avantajul pe care îl permite
Modul de corecție magnetică
După cum sa observat deja, în modul "GPC", sistemul de curs valutar funcționează în același mod ca o giroscoapă convențională, de aceea acest mod nu necesită o analiză separată. Luați în considerare sarcina
Conceptul de radio altimetre
Radio altimetrul (PB) este un dispozitiv radio autonom. Aceasta înseamnă că undele radio sunt utilizate pentru funcționarea sa și că nu este necesară echiparea la sol. dec
Principiul funcționării, dispozitivul și altimetrul barometric de eroare.
Conform principiului dispozitivului său, altimetrul barometric este în esență un barometru aneroid, cu singura diferență că scara sa nu este gradată în ceea ce privește presiunea, ci în unități de
Barometric eroare altimeter
Barometrul altimetru are o serie de erori, care diferă în funcție de cauzele lor. Erorile cauzate de diferiți factori sunt adăugați împreună pentru a forma o eroare comună - diferența dintre
Nivele de date barometrice
În principiu, prin stabilirea presiunii pe scara altimetrului barometric, pilotul poate alege nivelul de la care dorește să contorizeze înălțimea. Dar în ceea ce privește siguranța zborurilor,
Reguli pentru instalarea presiunii pe scala altimetrului barometric
Luați în considerare ordinea instalării presiunii în timpul zborului la SPT. Tehnologia tradițională adoptată în țara noastră prevede că înainte de plecarea tuturor membrilor echipajului pe altimetrele lor
Indicatoare de viteză cu o singură săgeată
Ecuația Bernoulli include densitatea aerului ρ în ambele secțiuni ale fluxului. Pentru viteze reduse (până la 400-450 km / h) și altitudini de zbor (până la 4000-5000 m), aerul poate fi considerat incompresibil
Indicatori de viteză combinate
La viteze și altitudini ridicate, diferența dintre viteza reală și viteza instrumentului este deja semnificativă. În plus, compresibilitatea aerului începe să aibă un efect vizibil asupra vitezelor și înălțimilor mari. Poetul
Indicatori de eroare
Erorile instrumentale ΔV și apar datorită imperfecțiunii designului dispozitivului și inexactității ajustării acestuia. Fiecare instrument are propriile valori instrumentale.
Conceptul numerotării
La efectuarea oricărui zbor, membrii echipajului de comandă trebuie să cunoască în orice moment locația actuală a aeronavei. Determinarea locației aeronavei - una dintre principalele sarcini ale navigației aeriene. În navigația aeriană
Calculul grafic
Garnitură completă. Scopul benzii complete este de a determina MS-ul curent și, prin urmare, desigur, acesta este efectuat în timpul zborului. Nu trebuie să vă gândiți că în fiecare zbor pilotul sau navigatorul a efectuat
Principiul calculului automat al coordonatelor ortodromice private.
Numerotarea este calculul coordonatelor actuale, prin urmare, partea principală a oricărui sistem de numere automate este calculatorul de navigație. Poate fi analog, adică baza
Diss. Kursodoplerovskoe și calculul procursus.
Viteza și viteza Doppler (DISS) sunt dispozitive radio de la bord care vă permit să măsurați viteza la sol și unghiul de rulare la bordul aeronavei. DISS pe baza utilizării
Regulile de bază ale navigației aeriene. Calea de control și tipurile acesteia.
Pe durata zborului, echipajul trebuie să respecte următoarele reguli de bază pentru navigația aeriană. 1) Controlul menținerii unei anumite traiectorii de zbor la intervalele necesare asigurării
Orientare vizuală.
Orientarea vizuală este o metodă pentru determinarea MC bazată pe o comparație a hărții cu terenul care se deplasează. Pentru orientare vizuală, se folosesc repere. Punct de navigație
Metoda generalizată a liniilor de poziție. Parametrul de navigare, linia de suprafață și poziția.
Parametrul de navigare. Locația aeronavei poate fi determinată utilizând diverse instrumente tehnice, inclusiv ajutoare de radionavigație și diverse metode. Dar, așa cum arată profesorul V.V.
Suprafață și linie de poziționare.
Dacă la un moment dat în spațiu parametrul de navigație are o valoare definită, atunci acest lucru nu înseamnă că la alte puncte valorile sale trebuie să fie diferite în mod necesar. sigur
Tipuri de linii de poziție.
În navigație, parametrii de navigație sunt cei mai des folosiți, care sunt valori geometrice, adică distanțe, unghiuri etc. În acest caz, fiecare tip de parametru de navigație corespunde
Caracteristicile de navigație ale sistemului de compas radio.
Sistemul de busolă radio include o stație de radio la sol și un detector de direcție la bord, denumit un bus radio automat (ARC). Deoarece stațiile radio pot fi utilizate special instalate
Principiul ARC și ordinea setărilor sale.
Principiul de funcționare al busolei radio se bazează pe recepția direcțională a undelor radio. ARC include următoarele componente principale: - o antena cu buclă rotativă; - nu direcționate (shly
Metode de zbor pe PHT (pasiv, curs, activ).
Modalități de zbor spre sau de la postul de radio. După cum am arătat mai devreme, CSD nu este un parametru de navigație, deoarece în același punct din spațiu poate avea orice valoare
Controlarea rutei în direcția folosind ARC când zboară spre și dinspre RNT.
Calea de control a căii în direcția. Există un termen general "punct de radionavigație" (RNT), care poate fi folosit pentru a desemna orice mijloc de radionavigație terestră: OP
Domeniul de cale de control cu ajutorul ARC.
Controlul distanței de cale este determinarea distanței parcurse sau a distanței rămase la MRP. Pentru ao efectua, puteți folosi și ARC și PRSD. Dar pentru aceasta, PRSD, desigur, nu ar trebui să fie
Calculul IPA și definiția SM pe două posturi de radio.
Pentru a rezolva unele dintre problemele de navigație, de exemplu, pentru a determina MS, este necesar să se stabilească pe harta LRPS. Pentru a face acest lucru, trebuie mai întâi să determinați rulmentul aeronavei. Deoarece pe orice hartă aplicată
Determinarea amplasării aeronavei pe două posturi de radio
Determinarea poziției aeronavei este un control complet al căii, deoarece dacă poziția avionului este cunoscută, este posibil să se determine devierea de la LZP (controlul căii în direcție) și distanța acoperită
Corectarea căii cu ieșirea către MRP și unghiul de ieșire.
Corectarea căii cu eliberarea MRP. Corectarea căii este o acțiune pentru aducerea aeronavei într-o anumită traiectorie, după detectarea unei deviații de la ea. Un fel de isp
Cale de corecție cu unghiul de ieșire
La începutul capitolului 1, a fost discutată una dintre căile de corectare a căii - cu eliberarea MRP. Dar o astfel de metodă în aviația civilă este aplicabilă în principal pentru mici abateri lineare, de exemplu,
Indicii precum RMI și UGR. Zbor pe LZP cu utilizarea lor.
Cei mai cunoscuți așa-numiți indicatori radio-magnetici (RMI). În limba engleză, acestea sunt numite în același mod - Radio Magnetic Indicator (RMI). În unele tipuri de sisteme interne de navigație
Zbor în alinierea posturilor de radio
Dacă zborul urmează să fie efectuat pe LZP, pe care sunt instalate două posturi de radio, atunci vorbește despre un zbor în alinierea posturilor de radio. Dacă soarele zboară între RNT (una în față și cealaltă în spatele), atunci țintă este chemată
Acțiunea minimă și maximă a RNS.
Intervalul minim de acțiune. În planul vertical, modelul de directivitate al majorității ajutoarelor de radionavigație la sol (stații radio, balize radio) arată aproximativ
Caracteristicile de navigație ale sistemului de orientare.
Caracteristicile sistemului de orientare radio. Sistemul de identificare a direcției radio este în primul rând un mijloc de control al traficului aerian (ATC). Cu ajutorul său, controlorul de trafic aerian de la sol
Sistemul de baliză radio VOR și aplicația sa pentru zbor pe LZP, definiția MS.
Principiul VOR. Sistemul de voce radio goniometric VOR (Gama Omni-Direcțională foarte frecventă) include echipamentul de la sol - un baliză radio VOR și echipamentele de bord
Determinarea amplasării aeronavei de către o stație radio
În conformitate cu metoda generalizată a liniilor de poziționare, pentru a determina SM, sunt necesari doi parametri de navigație și două linii de poziție corespunzătoare. Se pare că dacă postul de radio este doar unul
Principiul funcționării sistemelor de măsurare a distanței. Interval orizontal și orizontal.
Caracteristică DME. Sistemul de radionavigație de la distanță (DRNS) include echipamentul de la sol (bacul radio cu distanța de mare distanță) și echipamentul la bord (dispozitiv de apropiere a aeronavelor)
Sisteme de măsurare a distanței goniometrice. Caracteristici de navigație RSBN.
Sistemele de radionavigație goniometrice (UDRNS) numesc astfel de sisteme care vă permit să măsurați simultan doi parametri de navigație - lagăr și interval. Cu ajutorul UDRNS puteți
Caracteristicile de navigație ale radarului de la sol și utilizarea acestora pentru a monitoriza și corecta traseul.
Conceptul de radar. Sub radar (de la "radio" și locație (lat.) - pentru a determina locația) într-un sens larg al cuvântului înțelegeți cum să determinați locația și caracterul
Conceptul de navigație zonală.
Ghid de navigare. Este imposibil să înțelegeți ce navigare pe zone este și navigația modernă în general, dacă nu aveți o idee despre un astfel de concept ca navigația de navigație.
Principiul funcționării radarului de bord. Controlează radarul "Thunderstorm".
Stația de radar din aer (RLS) este un mijloc radio-tehnic autonom, care permite observarea imaginii radar a zonei zburătoare și a situației aerului înconjurător,
Metode de determinare a MS folosind radar (goniometru, distanțator, distanțiere goniometrică).
Cu radarul, puteți determina că MS este mult mai precis decât metoda generală comparativă. Pentru a face acest lucru, pe ecranul locatorului trebuie să măsurați unghiul de curs și distanța până la punctul de referință. Colțul cursului ori
Prezentare generală și metodă comparativă de orientare pe radar și definirea cu ajutorul vitezei și unghiului de avans al solului.
Datorită faptului că imaginea terenului zburător este formată pe ecranul radar, pilotul poate conduce orientarea prin compararea imaginii radarului cu harta zborului, ca și
Determinarea vitezei la sol și a unghiului de deviere prin radar
Determinarea vitezei la sol. Toate reperele de pe ecran, pe măsură ce mișcările soarelui se mișcă în direcția opusă direcției soarelui, adică pe ecran în jos. ima
Principiul calculului inerțial
Sistemele inerțiale de navigație (INS) se bazează pe măsurarea accelerațiilor aeronavei de-a lungul axelor sistemului de coordonate. Accelerațiile sunt măsurate prin dispozitive numite accelerometre. Principiul de funcționare
Parametrii determinați cu ajutorul ins. Formulare gratuite.
Parametrii determinați de INS Sistemele inerțiale sunt proiectate pentru a determina coordonatele aeronavei. Dar, în procesul de determinare a acestora, puteți obține valorile multor d
Sisteme de navigație inerțiale de formă liberă
Timp de mai multe decenii, eforturile inginerilor care au dezvoltat ANN-urile tradiționale au vizat reducerea îngrijirii de sine a giroscoapelor care dețin gips-cartonul într-o poziție predeterminată. nu
Calculul cursului, vitezei și timpului vântului cunoscut.
Luați în considerare procedura de rezolvare a problemei pe un exemplu cu următoarele date inițiale: V = 400; ZMPU = 232; δ = 290; U = 70; S = 164; ΔM = -4.
Determinarea vântului în zbor.
Dată: V = 680; W = 590; MK = 312; MS = + 8; ΔM = -4. Găsiți: δn, δ, U.
Calcularea vitezei adevărate într-o săgeată largă.
Viteza reală conform indicării săgeții largi KUS se calculează cu formula: Vi = Vpr + ΔV și + ΔVa + ΔV cf + ΔV